Marlin 2.0 Guides
Marlin is an open source firmware primarily designed for RepRap project based FDM 3D-printers using the Arduino platform. This Marlin 2.0 Integration by Leandro Loiacono is modified to drive Community Robot Arm. It serves as a second firmware option to drive the robot in addition to 20sffactory Community Firmware. Software development is ongoing. Pen plotting shows promising repeatable results. 3D printing & Laser Engraving experiments to follow.
This Marlin Integration is intended for advanced users of Community Robot Arm who have used 20sffactory Firmware with parameters calibrated well in its ‘config.h’ file. Controller wiring remains identical.

Marlin 2.0 compiling error may occur on Windows. See this tutorial for a potential solution.
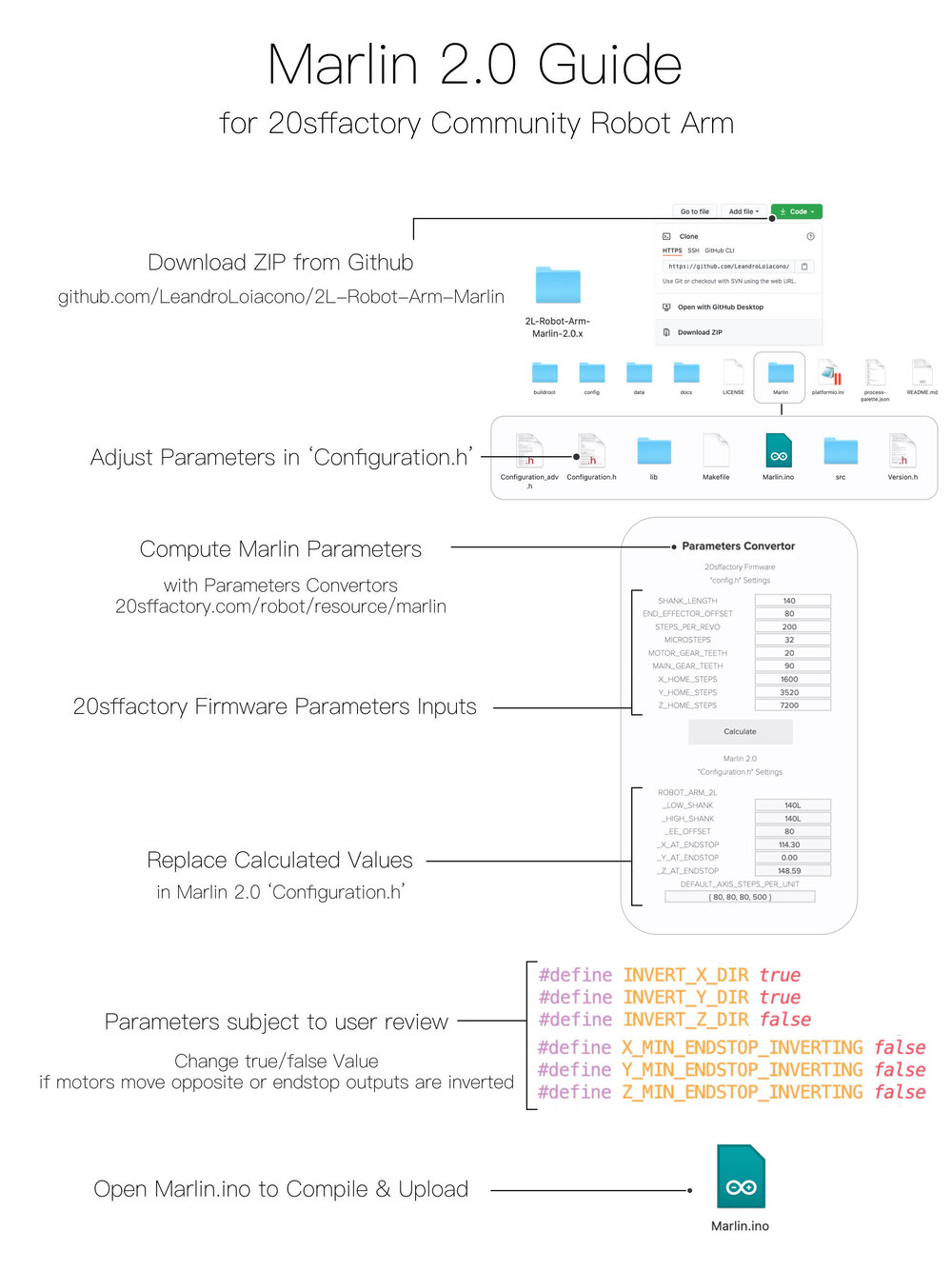
Parameters Convertor
Pen Plotting Guides
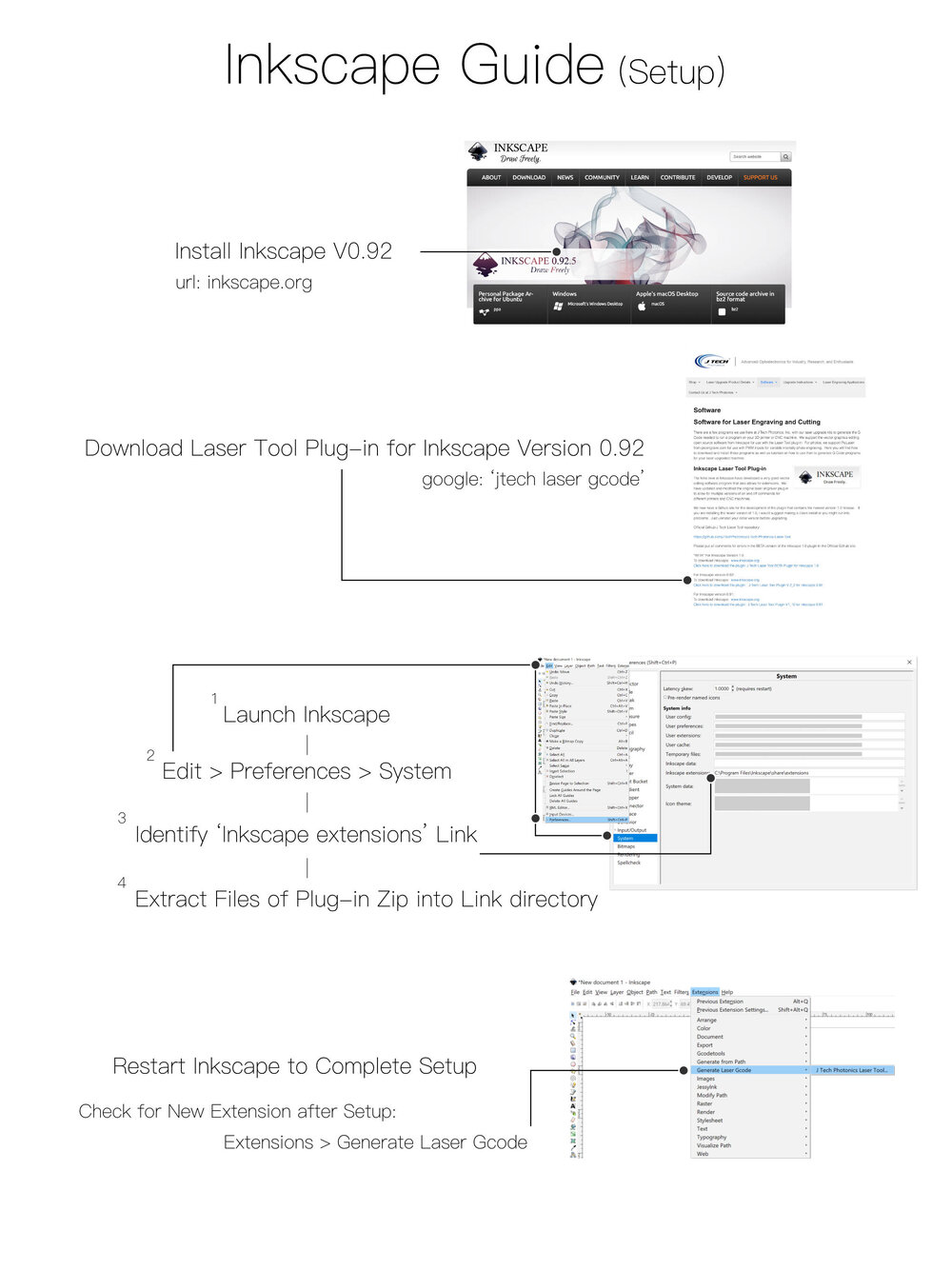
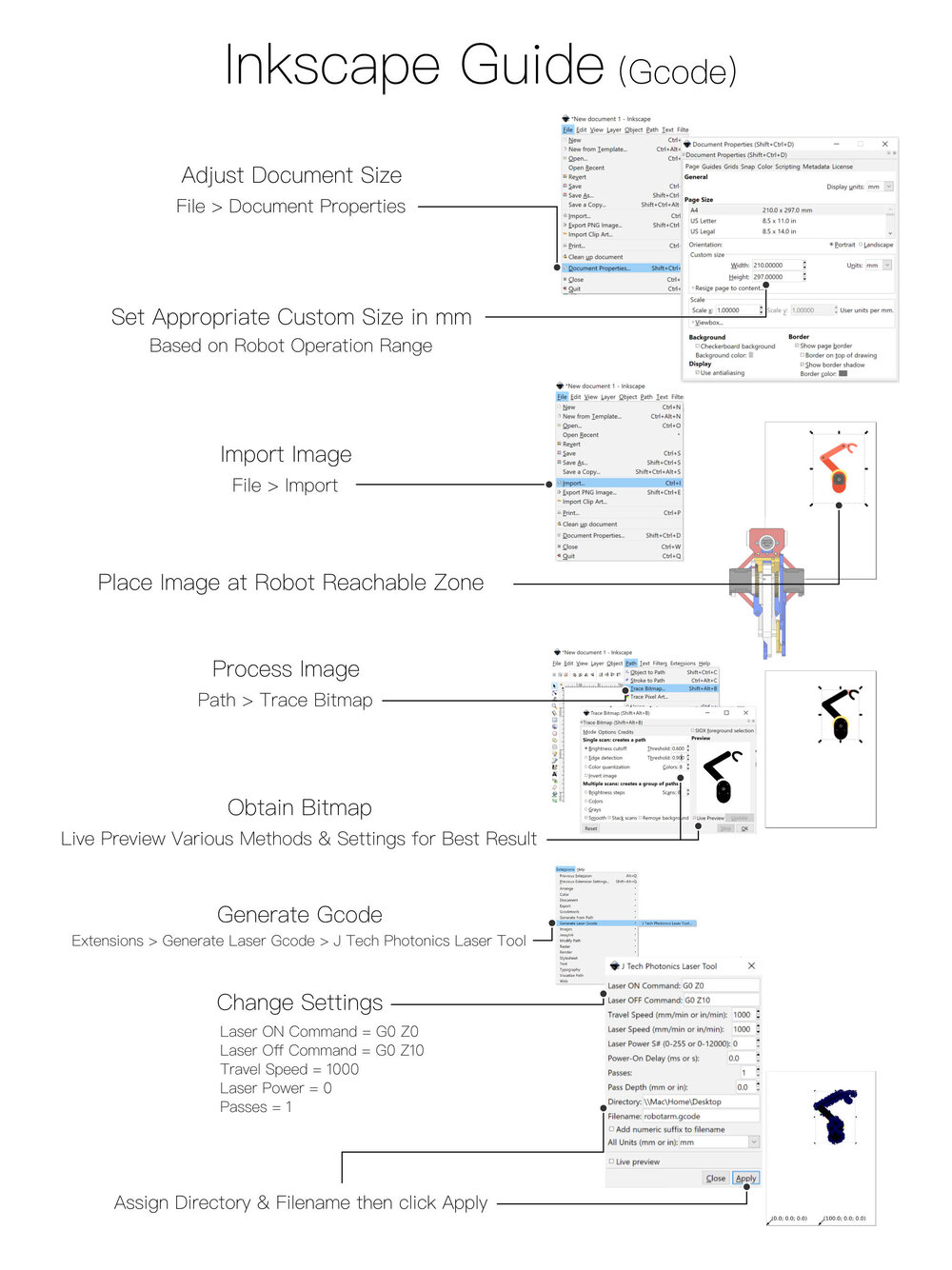
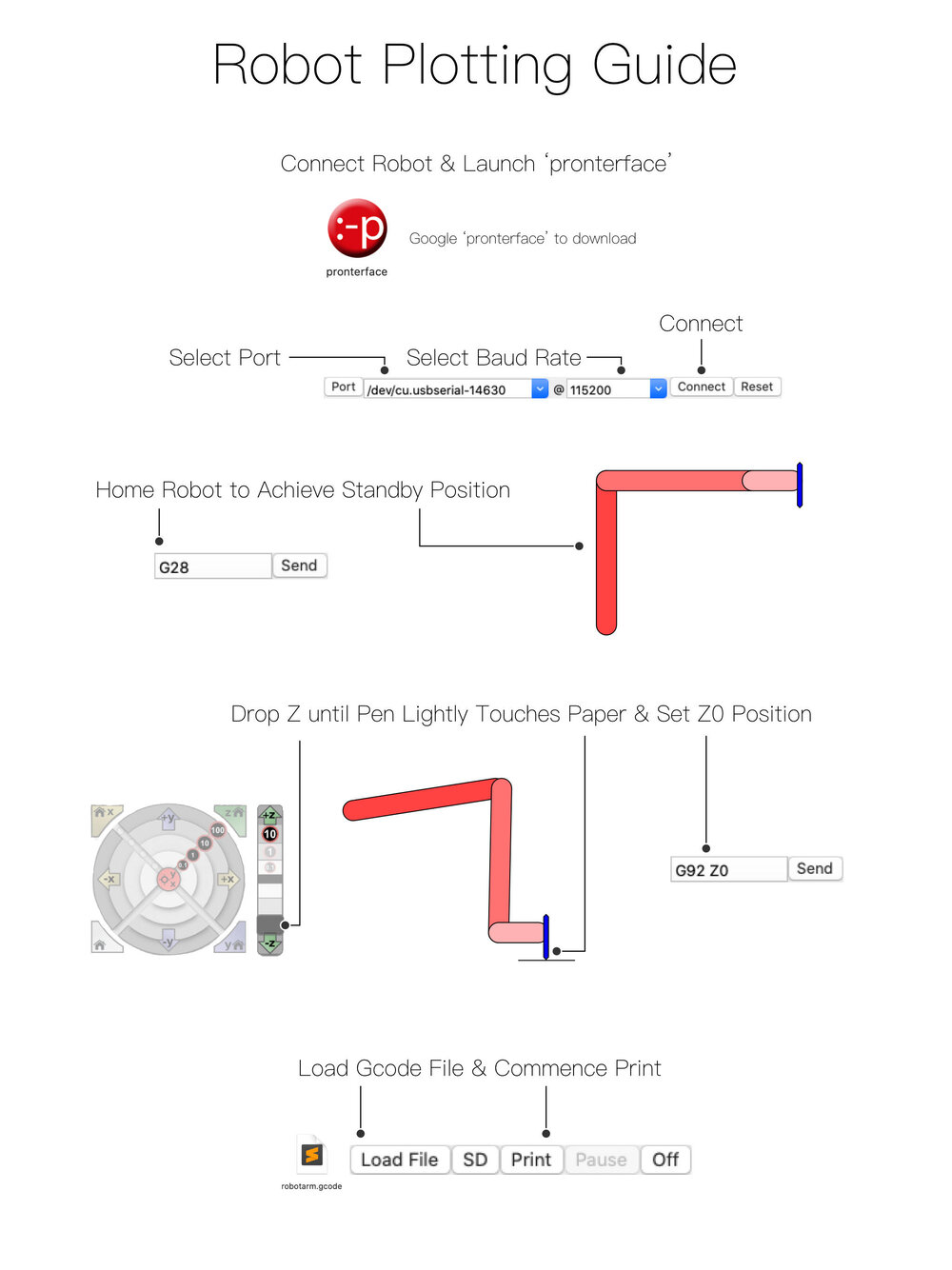
Marlin 2.0 integration to Robot Arm enables the function of pen plotting. The below guides provide methods to use Inkscape to generate gcode file from an image and to use Pronterface in gcode execution for the robot to complete pen plotting.
Board cooling fan does not turn on automatically in current Marlin version. User must send command ‘M106 S255’ via host program to activate cooling fan to avoid overheating in motor drivers.