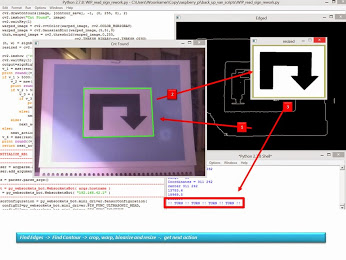
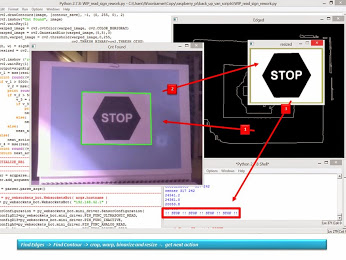
The script works with 4 signs (right, left, turn, stop) and you may find it at https://github.com/Bas-Huizer/Rpi-camera-robot-car.git The pictures show the overall logic of the script.
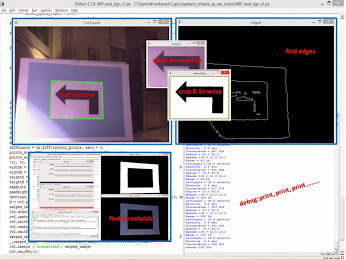
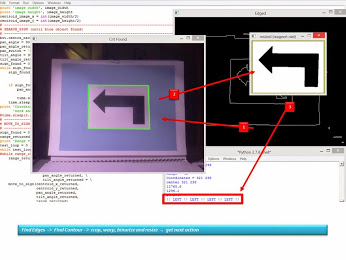
I documented the script rather intensively; maybe it helps beginners (like me) just starting/started.
For me it was a very inspiring quest and I learned a lot of Python, openCV and Numpy. And still there’s a lot to be learned. And a lot of fun playing with the bot! The next sprints will be on additional actions like line following.
Light conditions are crucial when tracking objects by its color. Probably it might help adjusting the Auto White Balancing and/or Dynamic Range of the camera. I didn’t figure out yet how to adjust those parameters using the raspberry-pi-camera-streamer class. (So, maybe Alan could hint me?)
Hints, additions, pulls, etc. on improving the script, especially on speeding-up performance and controlling the motors, are more than welcome!