DR Robot + ProtoCam!
Hi all
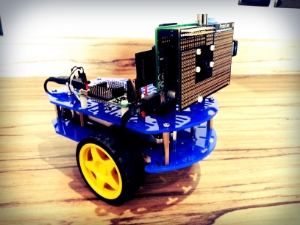
Been working on my Dawn Robotics robot for a while and had it up and running this week - absolutely love this thing, so easy to set up and works great on my Samsung Note 2. Will be doing a full blog post on it soon.
I used a bit of a different layout than the one suggested, which took a bit of thinking but I am happy with the end result. I use a PowerBank and have a micro-USB breakout instead of using the 2-pin USB cable (just because it looks cool really)

(notice the black camera belt protection...I'm addicted to tinkering!)
I also used part of one of those generic camera mounts, with some longer screws, to add like a protection plate to the camera board:
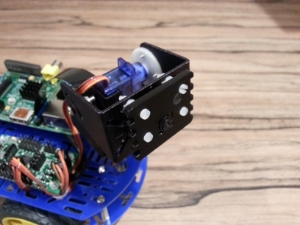
I decided to try my ProtoCam board on the front of it as well, just to see if it would be a viable solution - and it is! Whilst not as flexible as the DR servo mounted camera (this is stuck at one angle), it's another way to do it and gives you prototyping space to add sensors to the front of the robot.
I've done a blog post and video on it here:
http://www.averagemanvsraspberrypi.com/2014/09/a-front-mounted-raspberry-pi-robot.html
Next modification...my own 3D printed wheels...

Cheers,
Rich
Been working on my Dawn Robotics robot for a while and had it up and running this week - absolutely love this thing, so easy to set up and works great on my Samsung Note 2. Will be doing a full blog post on it soon.
I used a bit of a different layout than the one suggested, which took a bit of thinking but I am happy with the end result. I use a PowerBank and have a micro-USB breakout instead of using the 2-pin USB cable (just because it looks cool really)

(notice the black camera belt protection...I'm addicted to tinkering!)
I also used part of one of those generic camera mounts, with some longer screws, to add like a protection plate to the camera board:

I decided to try my ProtoCam board on the front of it as well, just to see if it would be a viable solution - and it is! Whilst not as flexible as the DR servo mounted camera (this is stuck at one angle), it's another way to do it and gives you prototyping space to add sensors to the front of the robot.

I've done a blog post and video on it here:
http://www.averagemanvsraspberrypi.com/2014/09/a-front-mounted-raspberry-pi-robot.html
Next modification...my own 3D printed wheels...

Cheers,
Rich