There is a number of lessons I have learned with my first attempt at a quadruped robot, Kubik. I think that the most important one is that the size does matter.
You see, if you double or triple the size of a robot, its weight is going to increase 8 or 27 times, respectively. That's because it grows proportionately to the volume, and volume grows proportionately to the third power of the size. This has consequences.
The first consequence is that suddenly you need eight times more powerful servomotors. Obviously they are more expensive, heavier and require more power. They are also slightly more dangerous, as they might have enough power to pinch your finger or break one of the parts. The second consequence is that you will need stronger materials. The cheap plastic servo horns will no longer be sufficient, you will need to use much heavier plexiglas, wood or metal. And because they are stronger, it's also difficult to cut them. The third consequence is that you are going to need better mechanical design. You can no longer just attach the servo to the body, and have the leg attached to its horn only. You will need to use proper servo brackets, possibly with ball bearings. That also adds to the weight. The fourth consequence: your more powerful servos will need more power, so you need larger and heavier battery, plus a stronger voltage regulator. It will also heat more.
But that doesn't end here. Once you have all those things, you can see that the weight of your robot increased even more! So you enter a vicious cycle of replacing part after part and redesigning your construction until it can barely bear its own weight and kinda limp about for several seconds until the battery runs out.
Now, let's consider what happens when you shrink your robot by half. It means that it became 8 times lighter. Of course, you had to make some sacrifices.
Your servomotors need to be smaller, but can also be weaker. The good news is that they get small faster than they get weaker, so you get quite nice amount of spare power. Also, until you pass the micro-servo size, the smaller ones are going to be cheaper (they get slightly more expensive when you get smaller than that, though). Your battery needs to be smaller and lighter, but it doesn't have to be as large anymore, so it gets cheaper. If you get down to 1S, it's also much easier to find charger modules and such for them. You can use practically any materials, so you can reuse parts that you already have, or easily make new ones. Your mechanical design doesn't need to be perfect. Sure, you will need more precision in some places, but you can also get away with just attaching something with a single screw. And you can just glue everything together anyways. Finally, you have to use smaller electronics. Your Raspberry Pi won't fit there anymore, so you have to look at the small micro-controller boards, or maybe something like the Vocore. You will have to program them in C or assembly, and you won't be able to do much processing on them.
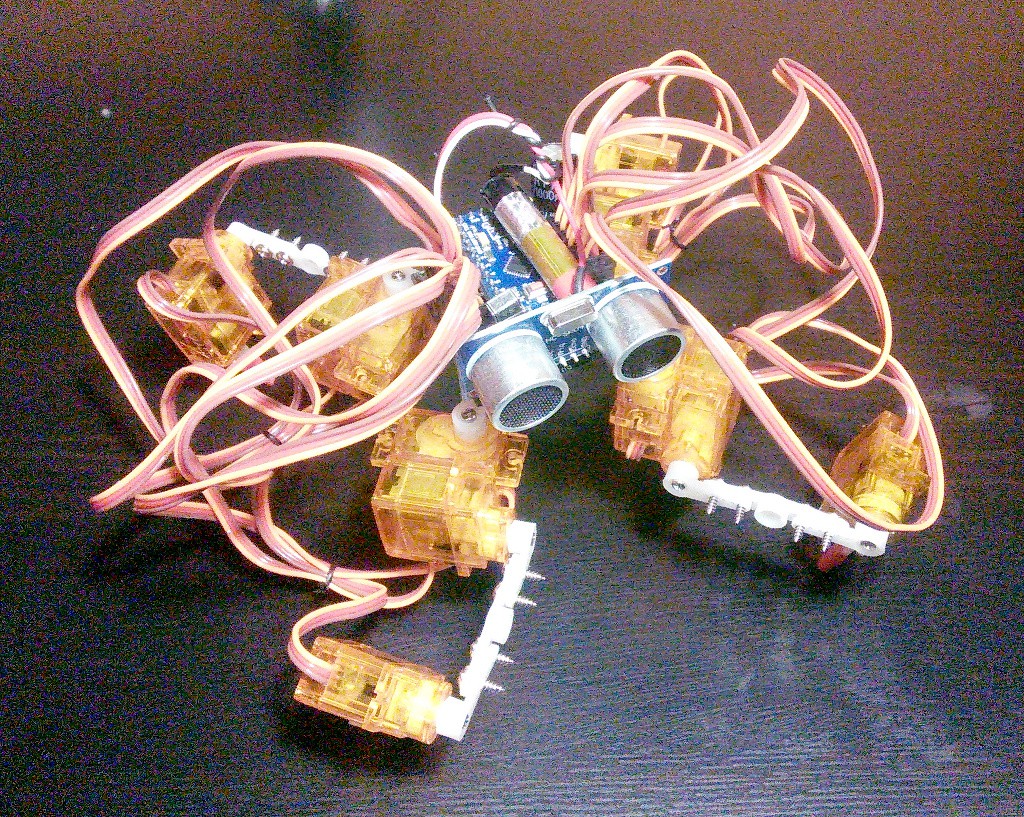
All those pros and cons change non-linearly with the size. That means, that there are certain "sweet spots", sizes which are easier to design, build and handle, and there are areas of pain. I believe, that with Micro-Kubik I hit a sweet spot for the price and ease of building. It uses the cheapest servomotors available, and the cheapest available Arduino clone. Its legs are just the plastic horns that came with the servos, held together by the screws that came with them too. It uses a 2S lipo battery that is very popular for the cheap RC airplane models. The most expensive part is the Bluetooth module, but I used a cable just fine before. And you can have it walk on your desk, without the need for a workshop and a storage space. Oh, and you can drop it on the floor from your table without any damage. Mostly.
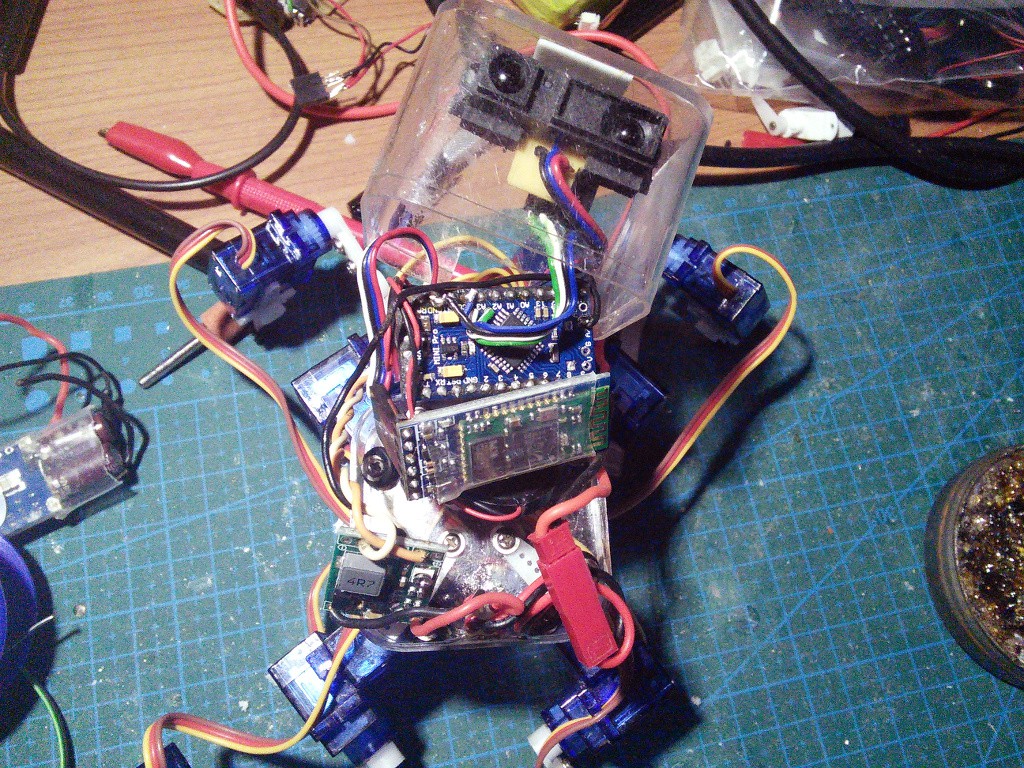
Sure, it's not a sweet spot for the processing power, or the number of sensors that I can fit inside (although I could have picked a bigger box for the body). But that...
Read more »
 Radomir Dopieralski
Radomir Dopieralski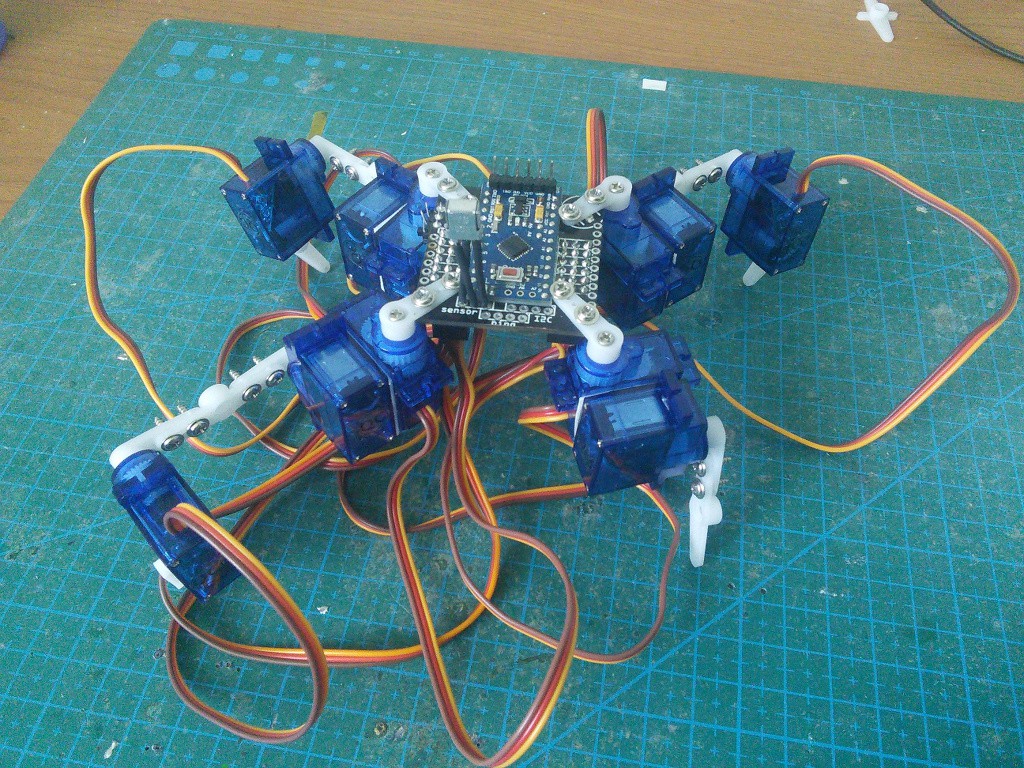

All the source code is available in the repository, so you can always look at that. It's not ideal, but can give you the idea.
Personally I got most of the information from a paper on the subject, I will give you a link as soon as I get home and find it.
But practically, for 4 legs you only have 6 reasonable variations (4 if you ignore mirrored ones), so even selecting the right one by trying all of them is not that difficult.