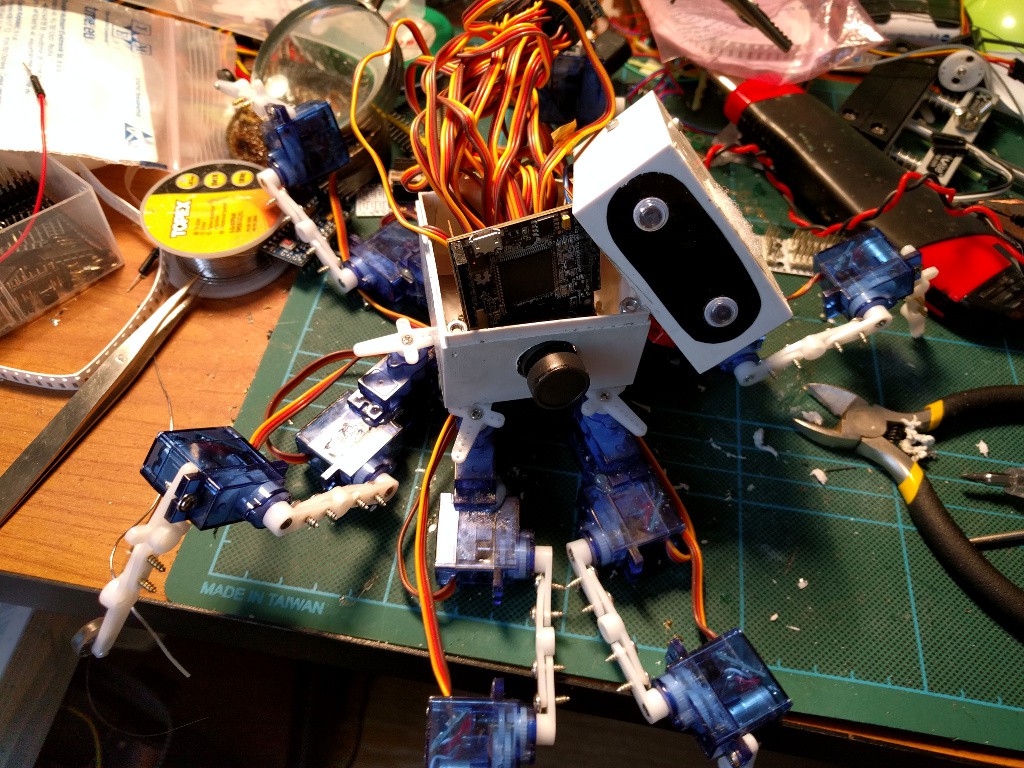
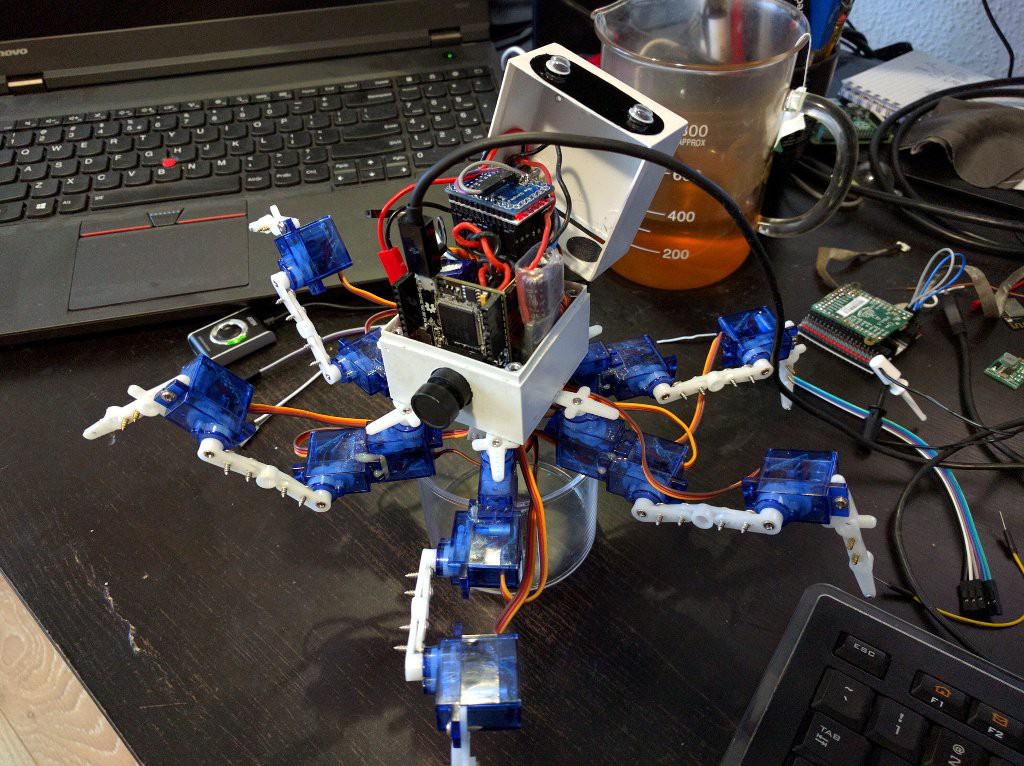
This robot waited on the shelf for a long time (enough for its LiPo battery to go bad), so when I got the #OpenMV board, I decided to install it here. I'm also replacing the Pololu servo controller I used in there with a much simplier #Servo Controller that I built out of a Pro Mini board. Other parts will probably remain the same, although I might need to skip the speaker, as ADC and DAC are on the same pin, and I need that battery voltage monitoring.
I started by testing the I²C communication between OpenMV and the servo controller. Since OpenMV is still in beta and not even yet released to Kickstarter backers, I didn't expect this to Just Work™ out of the box, and I was right. First, turns out that the SDA and SCL pins are reversed compared to what the documentation says. That was relatively easy to figure, I just swapped them and suddenly I2C.scan() started showing my device. Splendid!
Then I just copied the line that I previously tested with PyBoard:
bus.mem_write(struct.pack("<H", 1500), 9, 0)and... nothing happened. Except that further
I2C.scan() stopped finding anything, and further writes just returned
IOError 16 until the OpenMV board was hard reset. Interesting. I connected my pocket oscilloscope to see what is happening, and sure enough, the SCL line is being held low by the master after the first write. Looks like a bug in the firmware.So I started looking through the source code (it's available on Github). Initially I looked at the soft_i2c.c file, but soon I realized that it's only being used in the mlx module. Perhaps the authors had the same problem, and used software I²C to work around it and get the mlx to work?
Then @Arsenijs suggested on the hackaday chat that this may be related to an I²C bug that was recently fixed in Micropython. I tried disabling IRQs before calling the I2C.mem_write(), and lo and behold, it works! It's not necessarily this bug (as it only manifests when there is an error reading or writing), but switching the interrupts off makes the Micropython not use DMA, and apparently this works. Happy with that, I wrote about my findings on the OpenMV forum and went to sleep.
Next day I took Henk, opened it, ripped out the servo controller, connected the servos to the new one, drilled a hole for the camera to stick out, and here I am now, wondering how to best arrange the UBEC and battery inside. I will keep you updated.
 Radomir Dopieralski
Radomir Dopieralski



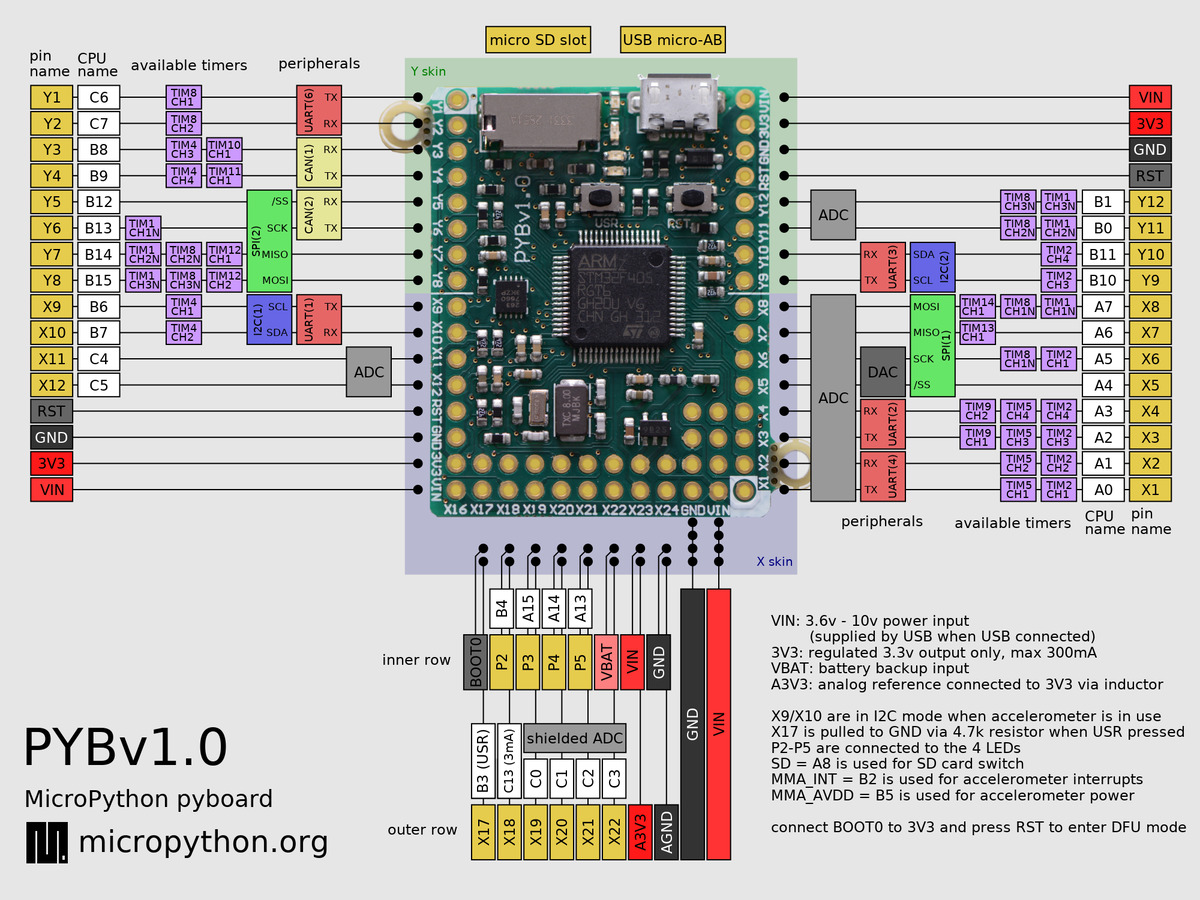 , you can see that there are several UARTs available (the red squares). Each has RX and TX pin. If you look at the servo controller's pins
, you can see that there are several UARTs available (the red squares). Each has RX and TX pin. If you look at the servo controller's pins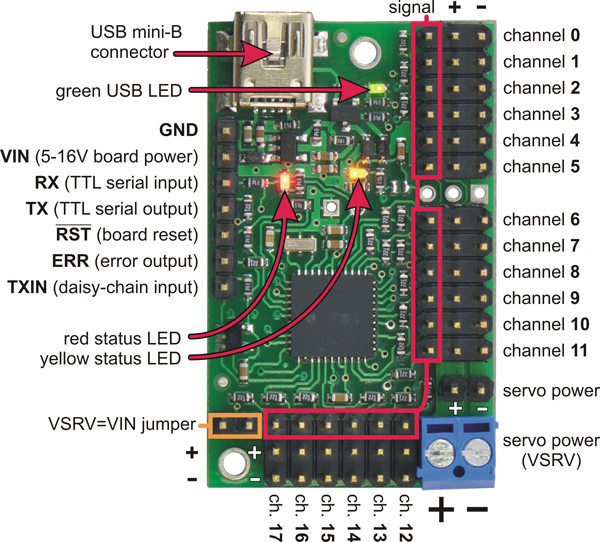
 Ryan Mitchell
Ryan Mitchell
Thanks alot ! This is very helpfull, I ll give it a try.