

Once you've built the chassis and soldered the PCB you're ready to connect everything together
Step one
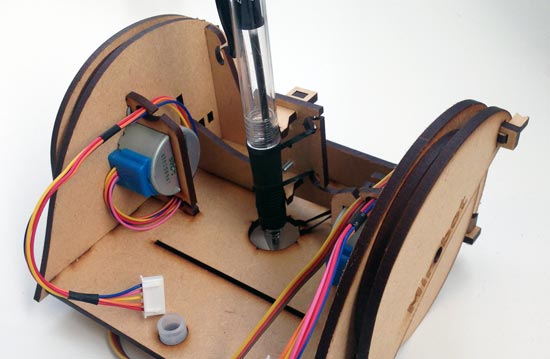
Put a pen into the pen holder. You'll probably need to adjust the two screws in the pen arm to get it to align with the centre of the hole.
Step two
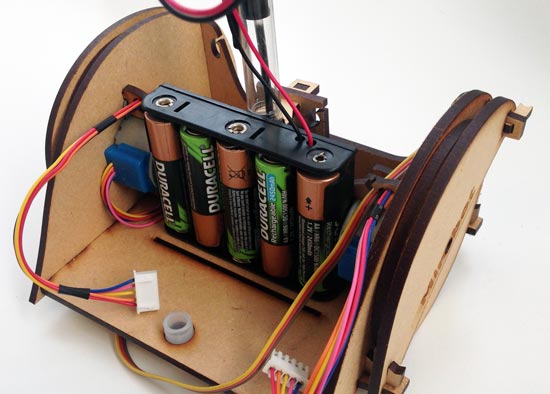
Put the batteries in the battery holder and slot it in between the two stepper motors.
Step three
Plug in the two stepper motor cables and the servo cable. The brown wire of the servo cable should be at the bottom. The white plugs for the stepper motors can only go in one way round.
Step four
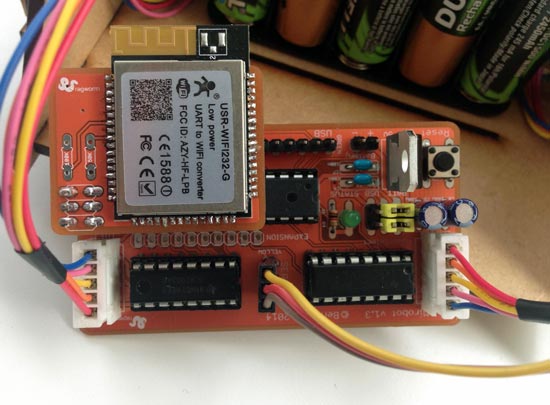
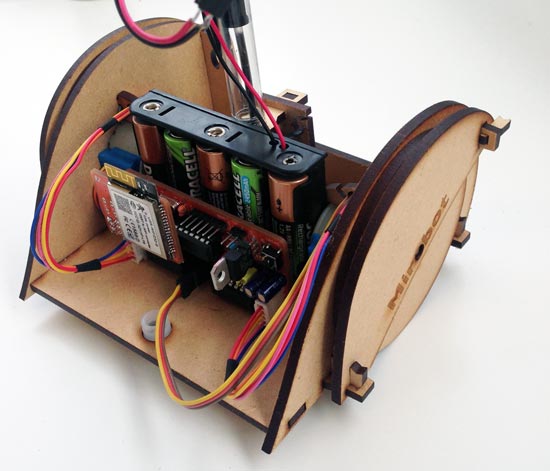
Slot the main PCB into the slot in the base of the chassis with the white stepper motor sockets at the bottom and the WiFi pointing up.
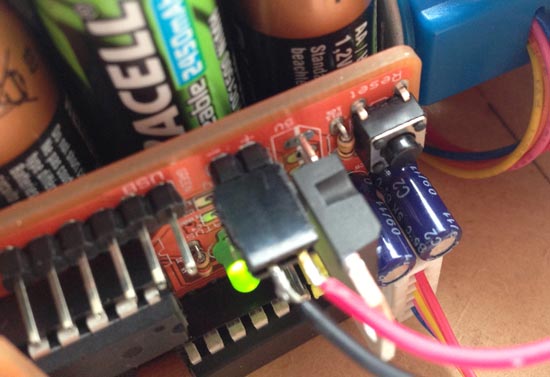
Step five
Plug in the power cable, making sure the red cable is on the side with a + marked on it. The LED on the PCB should start flashing.
Step six
Connect to the Mirobot WiFi network and go to the configuration page. Configure it for your WiFi network and note its address. From here you can start communicating with it over a socket - more details on this part to follow, but get in touch if you need any more info.