You are not logged in.
- Topics: Active | Unanswered
#1 Re: Any Questions » Firmware installation » 2017-09-23 11:28:14
Hi BobbyccW,
It seems you have a mistake on the board choosing:
x Arduino: 1.8.0 (Windows 10), Board: "Arduino/Genuino Uno"
o Arduino: 1.8.0 (Windows 10), Board: "Arduino/Genuino Micro"
#2 Re: Any Questions » head board developer edition » 2017-09-23 04:15:30
Hi Nico,
Please feel free to ask us to get an order of only the part, using email address 'shop@plen.jp' ;)
#3 Re: Customization Hints » Customization hint for PLEN2 compatible servos to use » 2017-07-28 07:09:17
Hi dielessen, sorry for delay in this reply to you X(
The firmware of PLEN2 can control a servo motor by bit-based PWM (written in JointController.cpp).
The Arduino device on PLEN2 (Atmega32u4) supports bit width as 10 bit (= 0 ~ 1023).
Thus, using the helper program, you can see a servo movement when input 10 bit value.
PWM configuration are different between one and another one, about servo motors.
For instance, connecting official servo and input 410, it moves -90.0 degree.
By the way, how can we define frame of reference on each servo motor?
I set up the axiom as wiki page right-hand: http://plen.jp/playground/wiki/specific … _reference
With a protractor, you can set up your own original servos configuration on the firmware.
#4 Re: Any Questions » Download latest version "ControlServer". » 2017-07-28 06:27:52
Hi Nico, sorry for delay in this reply to you X(
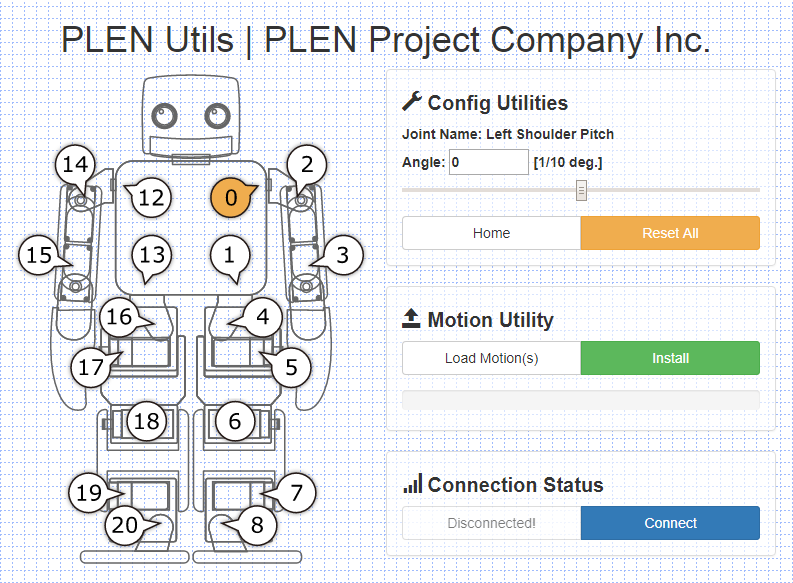
How to run the control server as configuration tool is shown as below:
1. Launch the 'ControlServer.exe' (for win) or 'ControlServer.app' (for OS X).
2. Open 'PLEN_Utils.url'.
3. After that, you can see the following window on your laptop if the application works fine.
#5 Re: Any Questions » ENSOUL_PLEN2 (natural moving on PLEN) » 2017-07-28 06:13:48
Hi there, I explain how the function works.
1. Get an acceleration sensor value from head-board (using serial).
2. Calculate the statistical values of acceleration, after that, decide to play what motion is better.
3. Run repeatedly these process by 100 msec.
Thus, serial communication is reserved every 100 msec, if you enable `ENSOUL_PLEN` macro.
This is the reason some application doesn't work fine on the environment.
#6 Re: Any Questions » Plen2 servo angle » 2017-05-22 03:34:47
#7 Re: Customization Hints » Customization hint for PLEN2 compatible servos to use » 2017-05-22 03:32:01
Hi dielessen,
Current actual URI is shown as below:
https://github.com/plenprojectcompany/p … wm_checker
I think you need to configure PWM width and also re-setting up positions of joints.
`pwm_checker.ino` can detect servos' PWM parameters pressing `m` or `p` key.
How to upload this is copying the files described in the `dependencies.json` to the directory, after that use Arduino IDE.
Using this sketch, you can see the servos movements and these PWM parameters on your serial terminal.
Please write down relationship between angles and PWMs in the following lines:
- https://github.com/plenprojectcompany/p … .h#L65-L67
- https://github.com/plenprojectcompany/p … #L135-L142
As set positions of joints, for instance, if you set up arm's servo being 0 degree as the center, the arm can move ±60 degree.
Being +30 degree as the center, the arm can move from +30 degree to -90 degree relatively.
#8 Re: Customization Hints » Customization hint for PLEN2 compatible servos to use » 2017-04-07 04:57:28
Also some of the repositories were changed new name.
For instance:
x plen__control_server -> o plen-ControlServer
x plen__firmware_for_Arduino -> o plen-Firmware_Arduino
#9 Re: Any Questions » Reset Plen2 » 2017-03-28 09:59:26
Hi anzenbp,
Actually, currently there are 2 lots of servo motor used on PLEN series robots.
Your PLEN2 is using old lot's one, so we need to order it from other consumer electronics company.
Just last week, we received that's servo motor. I think we can resend your PLEN2 by the end of this week.
We apologize for the delay in us resend this to you. Please wait for a while.
#10 Re: Any Questions » PLEN2 does not play back Motion even it is connected » 2017-03-27 10:39:36
Hi hyperhobby,
Just for confirmation, do you do pairing your smartphone with PLEN before running the apps?
#11 Re: Any Questions » Running ControlServer tool on Windows » 2017-03-27 10:22:46
Hi spacorum,
Please refer to the topic right-hand: https://plen.jp/playground/forum/viewto … d=415#p415
#12 Re: Any Questions » the PLEN2 make noise » 2017-03-27 10:21:16
Hi waitingme,
Please see the topics
-> https://plen.jp/playground/forum/viewto … d=349#p349
-> https://plen.jp/playground/forum/viewto … d=415#p415
#13 Re: Any Questions » Can´t set HOME positions on servos » 2017-03-27 10:05:08
Hi guys,
Just for reference, I introduce one of the assembling ways without any troubles below:
1. Connect your laptop with only PLEN's control board
2. Upload the latest version firmware -> https://github.com/plenprojectcompany/p … ses/latest
3. Run the latest version control server -> https://github.com/plenprojectcompany/p … ses/latest
4. Open PLEN_Utils.url
5. Click "Reset All" button
6. Connect PLEN's battery with the control board, after that, begin to connect each servos cables and assemble exterior parts, with turning on both switches and keep them turned on.
7. When you finished assembling PLEN, PLEN should be standing approximately straightly.
If not, you need to re-assemble it for tuning home positions without servos breaking.
8. Tune home positions using the control server.
#14 Re: Any Questions » shin » 2017-03-27 09:38:33
Hi jeanlouisquero,
As your using servo motor, I think it seems that is not official one.
Unfotunately I might not give you any useful information X(
The error message from the control server means "transition_time_ms property must be in the range of 32 to 65535".
#15 Re: Customization Hints » Customization hint for PLEN2 compatible servos to use » 2017-03-27 09:22:48
Hi jeanlouisquero,
Just for reference, our official github account was moved once: https://plen.jp/playground/forum/viewtopic.php?id=52
Changing the word 'plenproject' into 'plenprojectcompnay', the all URL could be working now.
#16 Re: Any Questions » Can I send sensor value to smart phone via BLE? » 2017-03-27 09:18:16
Hi Blipor,
Your question means "Why is this feature not available as default?" right?
#17 Re: Any Questions » Plen2 can not move » 2017-03-27 09:15:26
Hi guys,
As for the external EEPROM, 24FC1025 is the only correct choice without any buggy instructions.
We have been working to fix this misunderstandable issue, please wait for a while X(
#18 Re: Any Questions » shin » 2017-02-28 02:45:09
Hi jeanlouisquero,
I cannot understand French launguage X( Could you write down your issue in English?
#19 Re: Any Questions » Reset Plen2 » 2017-01-19 07:18:51
Hi High-Gi,
Please use address below:
PLEN Project Company Inc.
3F Meijiyasuda-Life Osaka Umeda Bidg. 3-3-20 Umeda Kita-ku Osaka-city Osaka 530-0001 Japan
Also, I recommend to write down "NOT RESTRICTED" on delivery ticket when you send your PLEN2.
P.S.
We will ask you to pay the repairing cost and re-shipping fee. Could you mind left-hand?
#20 Re: Report Bugs » マイコンに書き込めない » 2017-01-19 07:02:42
ボード自体をシリアルポートが認識しない状態でも、#2の方法は試すことが可能です。(具体的には以下の通りです。)
1. "ファイル >> 環境設定 >> 書き込みを検証する" にチェックをいれる。
2. USB micro B ケーブルで基板とPCを接続する。
3. "ツール >> ボード"を"Arduino/Genuino Micro" (名前にMicroと入るものであれば、それが正しいです。) と選択する。
4. マイコンボードに書き込みを行う。(ここまでで、ポートの選択は必要ありません。)
5. "PORTS {} / {} => {}" と画面下部に表示されだしたタイミングでリセットボタンを押下する。
一度お試しいただくことは可能でしょうか?
#21 Re: Any Questions » Reset Plen2 » 2017-01-16 07:09:17
Just for confirmation, your environment satisfies below, right?
- Firmware version is just v1.4.1.
- After stating up PLEN2, it is standing straightly.
- To install the motion files (e.g. https://github.com/plenprojectcompany/P … r/motions) was successfull.
If even one of the conditions above is not fulfilled, your PLEN2 doesn't work well.
Please send us your PLEN2 if you will have given up to tune it. We can fix the problem ;)
#22 Re: Report Bugs » マイコンに書き込めない » 2017-01-16 06:50:30
書き込みは複数回可能です。
- 基板を接続するUSBポートを変更する
- Arduino IDEを起動しなおす
- PCを起動しなおす
等で認識されないか、確認していただくことは可能でしょうか??
また、上記の方法で認識しない場合でも、「ファイル >> 環境設定 >> 書き込みを検証する」にチェックをいれた状態で書き込みを行い、
画面下,黒い部分に「PORTS {} / {} => {}」と表示されたタイミングでリセットボタンを押下することで、通常であれば書き込みは可能です。
なお現状、Windows環境では同様な現象は確認されなかったため、もしその他のボードに関しても症状が発生する場合、
OS X版におけるバグではないかと考えられます。
詳しくは右記をチェックしてみると良いかもしれません。 https://github.com/arduino/Arduino/issues
#23 Re: Any Questions » Reset Plen2 » 2017-01-11 03:17:38
Hi, High-Gi
Please let me know your software environment?
(Just for reference, recommended environment is shown as right-hand. https://github.com/plenprojectcompany/P … tware-set)
If you use the environment above, I think the error will be solved to do following process.
- Re-install the all motion files using PLEN Utils.
- Run the latest version Control Server, then launch PLEN_Utils.url.
- Click "Load Motion(s)" button to load the all motion files which are placed here.
- After that, click "Install" button.
#24 Re: Any Questions » Edison board schematics? » 2016-12-12 09:16:23
Hi rocha,
Firmware for ROS has been pubished on https://github.com/plenprojectcompany/p … ee/develop since June 17th.
Unfortunately, these program don't work on the latest version of Intel Edison X(
We have been finding the answers to solve the problem, please wait for a while.