You are not logged in.
- Topics: Active | Unanswered
#26 Re: Help and Support » X-direction Stepper Motor » 2016-09-12 14:14:14
I am also curious how to connect X stepper motor, but I am using patched mUVe 3D firmware and RAMPS board. Is it possible to control additional stepper motor by just adding G codes for X in printer profile G code section? Or there are something in the firmware which must be changed?
#27 Feature Requests » Lens distortion compensation » 2016-07-13 11:30:22
- color
- Replies: 2
Hello,
It will be great (for those of us which use macro lenses) if there are software compensation of lens distortion.
#28 Re: Tips, Tricks and Tutorials » Build Log / Showcase / Quasi-Tutorial : New Build Platform » 2016-06-24 05:15:20
If my printer was top down I would try with Emerald green. May be I would convert my CNC milling machine to top down system, not so hard to do it ![]()
#29 Re: Help and Support » Question about G code - Start of print » 2016-06-24 05:09:54
Ok, thanks, I figured out how to proceed. D variable is lift distance and I used a math function to set it zero for the first layer. Now everything works perfect.
#30 Re: Help and Support » Question about G code - Start of print » 2016-06-23 21:16:14
My settings for the "start of print" are :
G90
M650
D0.1 S3 R1
G90
[[PositionSet 0]]
But actually the Z is lift up about 3mm instead of 0.1mm
Why?
#31 Help and Support » Question about G code - Start of print » 2016-06-23 20:52:04
- color
- Replies: 4
Hello,
I have done settings of my Start of print section to ignore the initial M650 movement. After upgrade to the latest version 1165 it seems impossible - is this hardcoded? How to prevent moving up of the build platform before very first layer?
#32 Re: Tips, Tricks and Tutorials » Build Log / Showcase / Quasi-Tutorial : New Build Platform » 2016-06-23 12:09:36
Hi,
Very nice setup and print. What resin you use? I am curious is it possible to use B9 castable resins with top down systems?
#33 Re: Help and Support » Projector Control - Please Help » 2016-06-16 10:00:37
Ok, can you tell me what exact command to use to control my Infocus IN8606HD?
According manual these codes are for power ON and OFF
PWR0 Turn Off
PWR1 Turn On
#34 Re: Feature Requests » Encoder Support » 2016-05-31 09:54:15
I totally agree with backXslash about Z accuracy, it is very important for fine resolution printing. But if you make a good rigid mechanical construction and use a quality ballscrew with minimal backlash, you will achieve the same result.
#35 Feature Requests » Temporarily ignore home switch » 2016-05-16 11:34:35
- color
- Replies: 1
Hello,
It will be useful if there is a option to enable\disable home switch. I have a mUVe 3D printer and after homing procedure I am lowering the build plate about 0.5mm by turning the leadscrew by hand. My idea is to ignore home switch, go down 0.1 - 0.5mm below home position, set the new position as Z 0 and then enable again the home switch.
#36 Re: Bug Reports » Lost connection with Arduino board during printing » 2016-05-07 17:19:16
I think I discovered the problem, the servo motor of the shutter seems defective. After disconnect it from the Arduino board everything is OK.
#37 Bug Reports » Lost connection with Arduino board during printing » 2016-05-06 19:07:54
- color
- Replies: 2
Hi,
Build 1149
The printer finished the print job but it seems the Arduino board stopped receiving commands from the Pi during print. Unfortunately I don't have a debug file after this failure but here are the log file after restarting the printer.
2016/05/06 16:55:57.767383 {"Layer":"1","module":"SLAVE","level":"Error","msg":"Serial Communication Error EOF"}
2016/05/06 16:55:57.867669 {"Layer":"1","module":"SLAVE","level":"Error","msg":"Serial Communication Error EOF"}
2016/05/06 16:55:57.967955 {"Layer":"1","module":"SLAVE","level":"Error","msg":"Serial Communication Error EOF"}
2016/05/06 16:55:58.068234 {"Layer":"1","module":"SLAVE","level":"Error","msg":"Serial Communication Error EOF"}
2016/05/06 16:55:58.164499 {"Layer":"1","module":"SLAVE","level":"Error","msg":"Serial Communication Error write /dev/ttyACM0: input/output error"}
2016/05/06 17:01:12.845162 {"Layer":"1","module":"Printer","level":"Warning","msg":"Restarting"}
2016/05/06 17:01:23.442696 {"Layer":"1","module":"JSON","level":"Warning","msg":"Skipping db/custom-inputs.json file. stat db/custom-inputs.json: no such file or directory"}
2016/05/06 17:01:23.567437 {"Layer":"1","module":"Printer","level":"Warning","msg":"Restarting"}
2016/05/06 17:01:34.215895 {"Layer":"1","module":"JSON","level":"Warning","msg":"Skipping db/custom-inputs.json file. stat db/custom-inputs.json: no such file or directory"}
2016/05/06 17:01:34.349964 {"Layer":"1","module":"WIFI","level":"Warning","msg":"WIFI interface wlan0 detected"}
After a few restarts the printer start work normaly I don't know if this related to nanodlp or this is hardware issue?
#38 Re: Help and Support » Can I run nanodlp via Putty? » 2016-05-06 04:54:40
I updated nanodlp to 1149 and for now it's fine. The old 1131 still freezes constantly.
#39 Re: Help and Support » Can I run nanodlp via Putty? » 2016-05-04 17:44:12
Thanks,
I've just saw this in Troubleshoot topic.
Hey Shahin, I really like your software. There are some bugs, but your support is great!
#40 Help and Support » Can I run nanodlp via Putty? » 2016-05-04 11:06:13
- color
- Replies: 4
Hello,
Recently my printer start freeze in the midlle of printing. This happaned several times, I am using build 1131 and have done some large prints without problem but at the last two the printer just stop in the middle. I can not access nanodlp but it is not network problem because I can access my Pi via Putty. Is it possible to force nanodlp via Putty and what command to use for this?
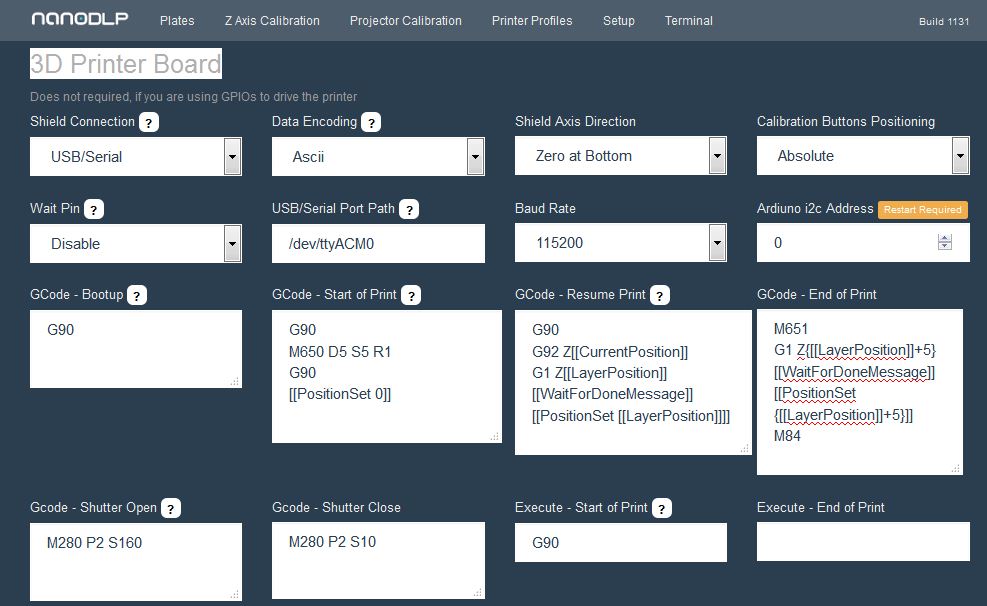
#41 Re: Help and Support » Mask question » 2016-04-17 08:36:15
Hi,
I allready have G90 in Bootup and Start of Print G codes. See the picture of my setup.
Here are the sequence of what I am doing.
1 Turn on power of Arduino
2 Wait 30 sec, and turn on Pi.
3 Home the Z axis.( Then I manually Update Z axis position, because after homing, the Z value isn't change to zero.)
4 Push button Z up 10mm once ( Z move up 10mm)
5 Push again Z up 10mm ( Z move up 20mm )
6 Another 3 times procedure 5 (Z again move in relative mode)
7 Push Z down 10mm button (Z move again up, instead down)
#42 Re: Help and Support » Mask question » 2016-04-17 06:00:26
Have you tried restore default setting button on setup page/ tools tab?
Yes, several times.
The only way to print is to remove the G28 from "Start print - G Codes" There are something wrong in or after homing procedure.
#43 Re: Help and Support » Mask question » 2016-04-16 11:51:35
HI,
I have tryied almost everything, wrote nanodlp image on new sd card, reload the muve firmware, and after upgrade to build 1131 I have the same problems. If I not home the printer i can start printing, but in first layer the Z axis go down about few mm below the initial position, then move up in first layer. If I set the build table just above the vat floor this first down move will crash the vat floor. Actually, if I start without initial homing, the Z axis move down untill home switch trigerred and then lift up for the first layer.
Please help me to make this printer working again!
#44 Re: Help and Support » Mask question » 2016-04-15 17:44:59
Hi Shahin,
Are there any progress about this issue? If I download the nanodlp image on new sd card which build will come?
#45 Re: Help and Support » Mask question » 2016-04-15 05:00:13
Is it possible to downgrade to previous version of nanodlp?
#46 Re: Help and Support » Mask question » 2016-04-14 21:04:55
Hi,
The mask is not issue anymore, but now my buttons in Z calibration gone crazy. After homing the printer, the up and down don't work correct. Very strange, because I've just done one full print without problems, and after that something wrong happened. I restarted the Pi several times, without effect. Here is ma log file in the attachement
nanodlp.debug.2073932541.zip
#47 Help and Support » Mask question » 2016-04-14 18:07:21
- color
- Replies: 12
Hi Shahin,
Are there any mask applied by default in nanodlp and how to check if the mask is actualy removed from the exposed layers? I am using a method to remove failed prints from the vat by exposing a rectangle at entire build area and when make a preview of layers I can see a mask with dark area at the center of the rectangle. I hav removed the mask from "Projector mask" tab but it still persist in the preview even after deleting and reloading again the plate. Just to be clear, there are no mask in "Projector mask" tab, it is visible only in the layer preview. The nanodlp version is 1131, all the settings was restored. By the way this was my first test with new version and the printer freeze after first 90-100 layers.
#48 Re: Help and Support » Question about additional servo motor » 2016-04-12 05:03:14
Hi,
If I decide to use a stepper motor for the tilt, how to configure it? Is it possible to wire this additional motor and its driver to RPi GPIOs and use both RAMPS for control the Z and RPi to control tilt? Is this will work with mUVe firmware?
#49 Help and Support » Question about additional servo motor » 2016-04-08 08:00:20
- color
- Replies: 3
Hi Shahin,
Is it possible to wire an additional servo motor to RPi and control this motor directly through RPi GPIOs ? My idea is to make a modified tilting vat for my mUVe printer which will be controlled by this stepper or servo motor. The other question is how to send G code for driving the motor. Probably I will need something like shutter open\close command just before start the default Z tilt lift after layer exposure.
#50 Re: Bug Reports » Wrong direction movement after print job done. » 2016-04-06 17:07:04
Hi Shahin,
Thanks for the replay, following your directions I restored all settings to default. It seems that after upgrade to the new nanodlp version the buttons for up and down movements are set by default to absolute mode, after changing it to relative, everything is OK.