You are not logged in.
- Topics: Active | Unanswered
Pages: 1
#1 Re: Support Generator » Supports do not touch the surface in curved surfaces » 2018-01-11 08:37:59
Hi SHahin,
I have increase (if you see the bottom touches) but as you go on the sides it becomes more and more far away.
George
#2 Re: Feature Requests » Show in main NanoDLP the name of the order that has finish printing » 2018-01-11 08:17:20
Fantastic. Thank you very much.
George
#3 Support Generator » Supports do not touch the surface in curved surfaces » 2018-01-10 22:03:16
- georgei
- Replies: 2
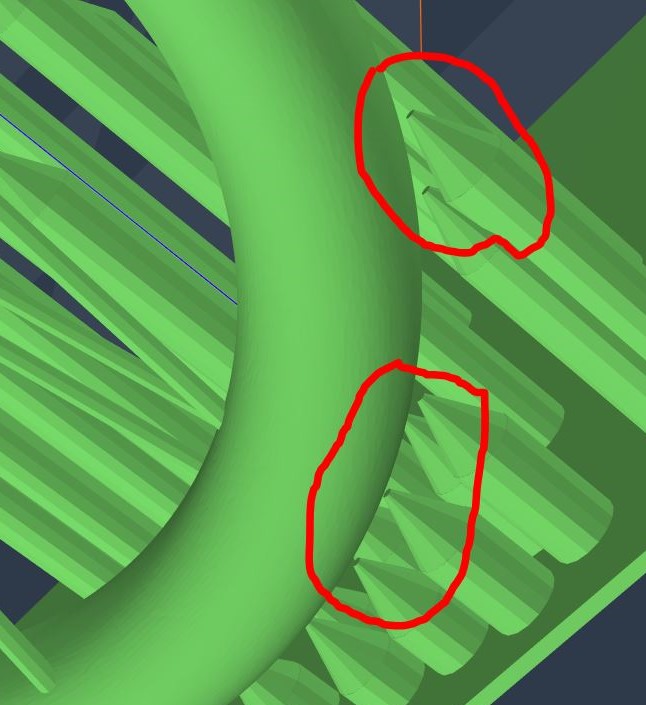
As the title says I had a big complicated ring and the supports do not touch the surface of the ring in the curved regions.
I have an image that makes easier to understand.
George
#4 Feature Requests » Show in main NanoDLP the name of the order that has finish printing » 2018-01-10 11:47:39
- georgei
- Replies: 2
A fast explanation of the problem:
I have several similar plates loaded on my ras and I choose which one to print.
When the plate finish printing the main NanoDLP screen turns to printer Idle.
I have no idea which plate has just finish printing.
Especially when you print overnight the next day you find the job printed and you do not remember which one it was.
Is it possible when the job is finish printing to show on the main page something like "Printer Idle - Job {Job Name} has finish printing" ?
Thank you,
George
#5 Re: Tips, Tricks and Tutorials » NanoDLP Dynamic Curing/Speed/Lift Guide » 2018-01-10 11:40:02
Hi lawgicau,
Any fast way to calculate the minimum - maximum exposure times?
How you have calculate yours?
George
#6 Re: Bug Reports » NanoDlp doesn't accept hole numbers as exposure times when you correct » 2017-12-06 20:36:57
It is Opera 49.0
George
#7 Re: Bug Reports » NanoDlp doesn't accept hole numbers as exposure times when you correct » 2017-12-06 08:17:39
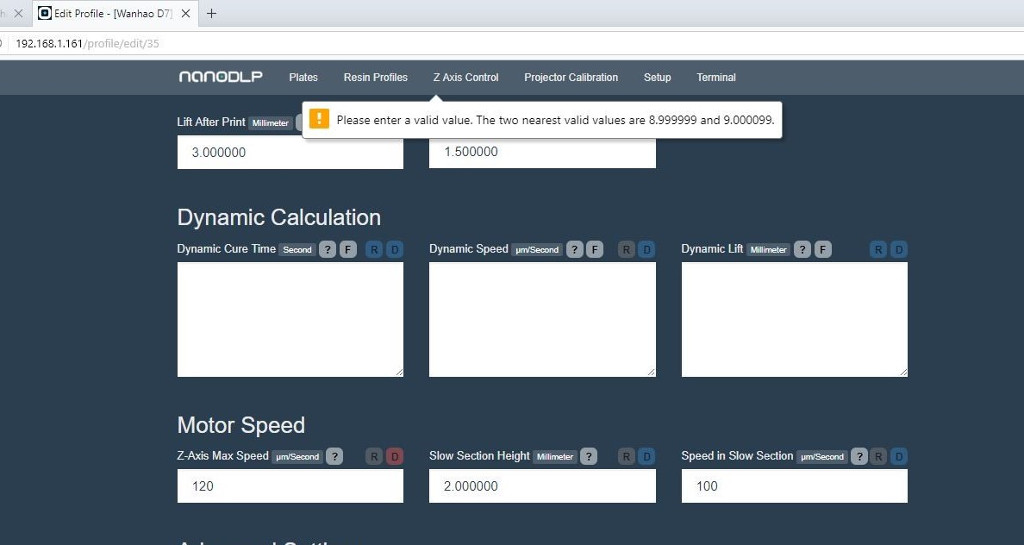
I have attached a screenshot.
George
#8 Bug Reports » NanoDlp doesn't accept hole numbers as exposure times when you correct » 2017-12-05 14:57:49
- georgei
- Replies: 5
I have been try to correct my exposure times in a couple of resins.
So I have gone to change the value from 17 second to 15 seconds.
When I have go to save the resin came an error:
"The exposure time must be 14.99999 or 15.0000099"
This was not happening in the previous version.
Is this a bug?
Thank you,
George
#9 Re: Feature Requests » Add drop model to table in "Add plate" menu » 2017-11-18 10:20:09
Can we do something about? Even as a separate button or choice?
George
#10 Re: Feature Requests » Add drop model to table in "Add plate" menu » 2017-11-17 23:11:57
Hi Shanin,
The strange think is the following:
I have put supports in an stl file in B9CCreator.
Take the stl file from there and centred and sliced direct in nanoDLP.
The first slices were empty showing that the part was not on the floor.
Have then take the stl file and touch it to the floor in Simplify3D.
Save it and then re-slice in nanoDLP.
The first slices where correct and were touching the floor.
From there I have assume that it doesn't move them to the floor.
George
#11 Feature Requests » Add drop model to table in "Add plate" menu » 2017-11-17 21:30:51
- georgei
- Replies: 5
Hi Shahin,
In the "Add plate" menu is it possible apart from the "Centre pieces" to have the models moved so that they have vertical 0 distance from the table.
I had a couple of cases where the model was 0.5mm above the table, didn't notice it and as a result the first layers had nothing.
The all print has failed of course because of that.
George
#12 Re: Feature Requests » Add up and down arrows in the layer preview screen » 2017-10-23 22:23:53
OK. Thank you.
#13 Re: Feature Requests » Add up and down arrows in the layer preview screen » 2017-10-23 21:48:16
Hi Shahin,
I have seen the new arrows in the layer preview but they are not doing anything when you click them. The frames are not going up or down.
Can you please have a look at it.
Thank you,
George
#14 Re: Feature Requests » Add up and down arrows in the layer preview screen » 2017-10-11 15:48:48
Thank you Shahin.
George
#15 Feature Requests » Add up and down arrows in the layer preview screen » 2017-10-11 10:00:59
- georgei
- Replies: 5
Hi,
Is it possible to have arrows which they change the viewing layers one by one?
At the moment it just has the slider which is not so accurate and usually moves more than one frame.
With the arrows (or buttons - UP - DOWN - if it is easier) you will be able to see one frame after the other.
Thank you,
George
KEEP UP THE AMAZING WORK.
#16 Re: Bug Reports » Boot gcode performed before ramps load. » 2017-10-01 10:42:36
The boot gcode is very simple:
[[Delay 20]] ; that is the delay I have added
G28 Z ; homing only the Z axis
G92 Z185.7 ; My home switch is at the top so I define the distance from the 0 point.
Nanodlp however is also sending: M280 P2 S10 right at the beginning of the boot that is the command to close the shutter. It sends this command without delay and it is lost (it is not executed because ramps is still booting).
The other problem I have is that 2 out of five restarts ending with the pi stuck or switch off. It is not accessible neither from the nanodlp web interface or putty.
I have to cycle the pi power to restart.
George
#17 Re: Bug Reports » Boot gcode performed before ramps load. » 2017-09-30 20:52:27
I have add even more delay and now the boot gcode commands are executed but the commands that sends the nanodlp to marlin to reset the servo shutter are still lost.
It looks like that on boot the ramps send some commands to nanodlp that are not know to program.
Have in mind that almost everything is the default settings that come with muve.

#18 Re: Bug Reports » Boot gcode performed before ramps load. » 2017-09-30 20:38:02
I have use a delay of 10 seconds but still the Boot gcode commands are interlined with the RAMPS.
I am using the Muve version of Marlin.
Is there any way for nano dlp to check that the ramps has boot before it sent these commands?
George
#19 Bug Reports » Boot gcode performed before ramps load. » 2017-09-30 17:45:50
- georgei
- Replies: 7
Hi everyone,
I have a very strange problem that has appeared today.
Whatever I have in the Boot gcode window is not executed.
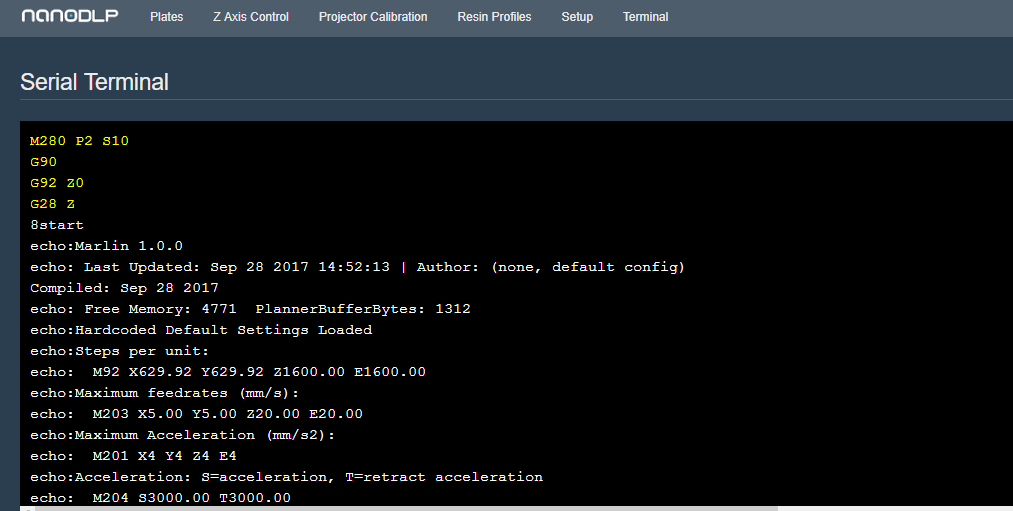
After a lot of search I had a look at the terminal immediately after boot and I see that the boot gcode is executed after the ramps loads.
I have attached an image.
I have try the windows version. There is executes correct the boot gcode.
In other words is waiting first to have communication with the marlin and then sent the commands.
Is this a bug or there something else wrong?
Thank you
George
Pages: 1