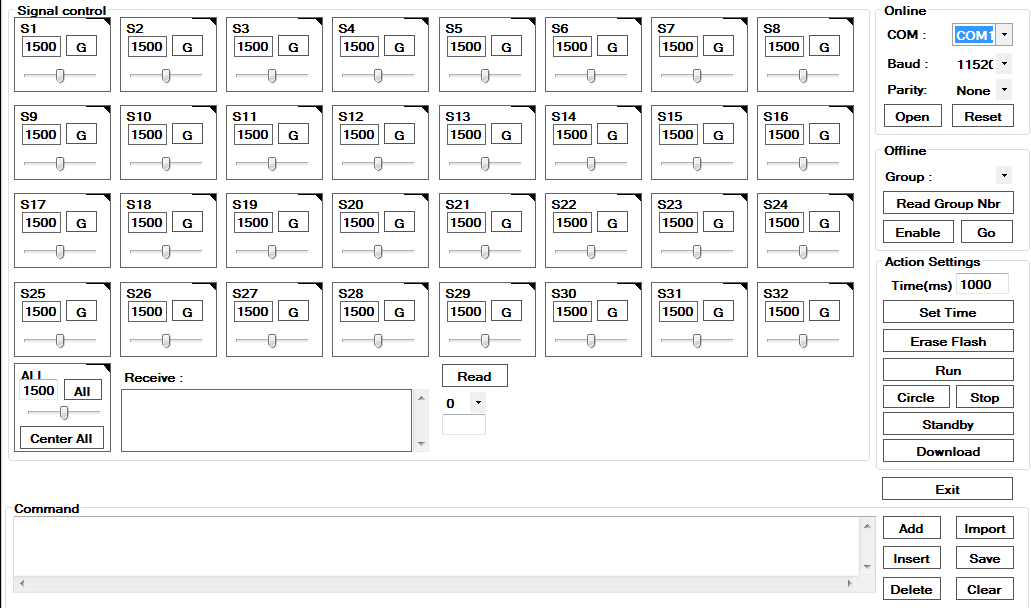
Open source 32 channel servo control board Rhythm Power 32
We are open source!
1 separate servo power and control board power supply, independent power supply
2 control channel: control of the 32 channel. (adjustable speed adjustable)
3 input: USB or serial communication (TTL), Bluetooth 2
4 signal output: PWM (precision 1US).
5 servo driven resolution: 1US, 0.09 degrees.
6 baud rate range: 115200
7 support: Futaba, Hitec, Fraser, spring, etc. the servos on the market more than 98%
Graphical control software