|
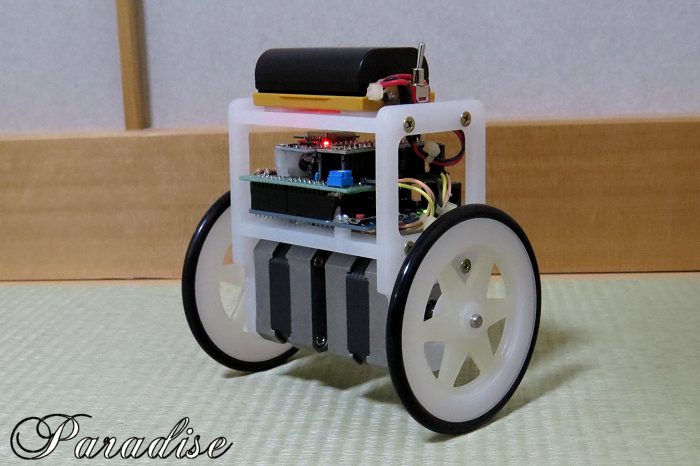
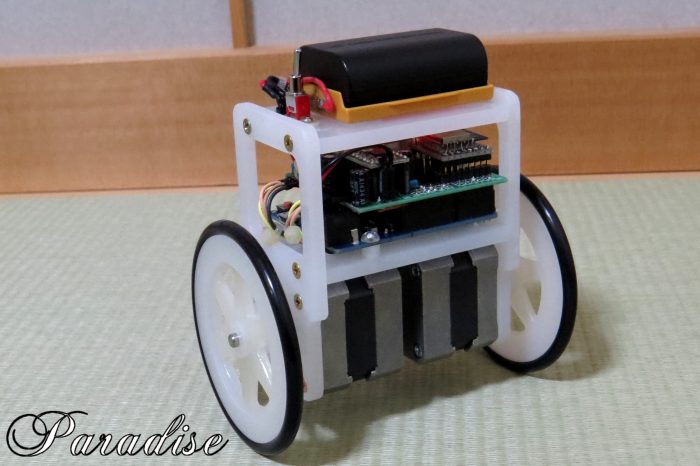
今回はjjrobots社公開のB-ROBOTを国内で購入出来る部品を使って2種類完成させました。 一つはマイコンにArduino Pro Microを使用、もう一つはArduino Leonardoを使ったタイプです。 B-ROBOTの特徴は駆動モーターにステッピングモータを使っていることで、ギアーモーターのような バックラッシュが無く、モーターシャフト直結の車輪で安定したコントロールが得られることです。 先ずは、jjrobots社B-ROBOTのページを紹介します。jjrobots社では、B-ROBOTの回路図やsketchの他、 躯体の3Dプリンターのデータまで公開されていて、部品の完成品も販売されています。 B-ROBOTはリモコン操作にスマホやタブレットのWiFiを使いますが、完成基板のWiFiモジュールに ESP-12Eを使用のため、電波法の関係で日本国内で使用できません。 私は、ESP-12Eに替えて日本の技術基準適合証明が付いたESP-WROOM-02を使いました。 ここでは変更部分の回路図を掲載に留め、必要な回路図やソフトウエアーはjjrobots社HPを参照して下さい。 二つ目はArduino Leonardoを使ったオリジナルに近い作品です。 |
| マイコンArduino Leonardo | アマゾン:1個 970円 |
| ジャイロセンサー MPU-6050 | アマゾン:1個 465円 |
| ステッピングモータードライバ A4988 | アマゾン:2個セット1280円 |
| WiFiモジュール ESP-WROOME-02 [M-09607] | 秋月電子:1個 550円 |
| アルミ電解コンデンサー35V100μF 2個 | 秋月電子:1個 20円 |
| 3端子レギュレータ、3.3V150mA [I-09119] | 秋月電子:1袋2個 100円 |
| Arduino用 ユニバーサルシールド基板 [P-06877] | 秋月電子:1個 200円 |
| Oリング1A-P67 2個 | モノタロウ:1個75円+税 |
| ステッピングモーター KH42HM2-801 2個 | オリジナルマインド:1個 680円 |
| 基板用トグルスイッチ3P [P-00300] | 秋月電子:1個 80円 |
| ピンヘッダ 1X40(40P) [C-00167] | 秋月電子:1個 35円 |
| 分割ロングピンソケット1X42(42P)[C-05779] | 秋月電子:1個 80円 |
| シナベニヤ公称3㎜(実際は2.8mm前後) | 300×300(mm)1枚 |
| 基板用真鍮スペーサー L42mm [P-07595] 4個 | 秋月電子:1個 40円 |
| その他線材及びビス類 | 少々 |
| マイコンについて |
|
B-ROBOT_2では、オリジナルと同じArduino Leonardoが格安に入手出来たので、これを使いました。 |
| WiFiモジュールについて |
|
先にも記しましたが、ここでは国内で使える技適証明が付いたESP-WROOM-02を使いました。 |
| ジャイロセンサーについて |
|
ジャイロセンサーMPU-6050をソケットを介して基板に取り付けますが、取り付け穴を利用して基板に水平に固定します。 |
| ステッピングモーターついて |
|
今回は日本電産製の未使用中古品をオリジナルマインド社から購入したものです。 このステッピングモーターの定格は5V仕様でステップ角1.8°の2相ユニポーラ型ですが、コイルの両端を使いバイポーラ接続として 使いました。勿論先のB-ROBOT 1号機と同様にキビキビと動き回ります。 |
| ステッピングモータードライバーについて |
|
ステッピングモーターは普通のモーターのように電圧を加えるだけでは回転しません。そこで活躍するのがモータードライバーの A4988です。 このドライバーの特徴はマイクロステップの設定がフルスッテップから1/16ステップまで選択出来ることです。 モーターのステップ角が1.8°なのでフルステップでは1回転に200ステップ、1/16ステップでは16倍の3200ステップ必要ですが、 分解能が16倍となりきめ細かな制御が可能となり、モーターの消費電流も抑えられます。 ドライバーのICチップには放熱用のアルミ製の放熱器が付属しますが、B-ROBOTの回路では放熱器が無くても温度が上がら ないので取り付けてません。 ドライバーのモーター電源入力の入口に35V100μFのアルミ電解コンデンサーを取り付けます。 モータードライバーの電流調整:購入時の状態では電源電圧7.5Vにて1A前後流れるので基板上のVRにて調整します。 調整方法:組み上がり、倒立が完成すればバッテリーとシールド基板の電源端子間に電流計を接続し、片方のモーター端子を 外して倒立を行い、この時に流れる電流を300mAに調整します。もう片方も同様に調整しますが、左右の電流値を揃えます。 次に両方のモーターを接続した状態で測定すると約500mA程度に収まると思います。元の状態より電流が半減し、モーターの 温度が殆ど上がらず、倒立動作やスピードにも影響しませんでした。 |


|
フレームの切削加工画像です。DXFデータは「こちら」をクリックして下さい。 左は下段棚板:Aruduino Leonardo基板を設置する棚で2.5mm下穴4か所にM3タップを切ります。 右は上段棚板:電池とスイッチを取り付ける棚ですが、使用する電池に合わせて加工が必要です。 上下の棚板には側板取り付け用のM3ネジ穴を加工します。穴の位置は端から12mm、深さ10mmです。 中央は側板:3mm下穴に6mmドリルでM3皿ネジ加工を行います。 |
|
ホイールの切削加工画像です。DXFデータは「こちら」をクリックして下さい。 ホイールの内部は2mmのポケット加工をします。裏側でハブをアクリル接着剤で張り付けますが、 先にイモネジ用の下穴2.5mmを開けM3タップを切っておきます。また、ホイールの外周にはタイヤの Oリングが入る溝を、ボール盤を旋盤代わりに使って深さ2.5㎜の溝を彫り込んでます。 |
|
1)2号機はオリジナル回路そのままなのでsketchを変更する必要ありません。 2)WiFiモジュールをESP-WROOM-02に変更に伴う回路変更 オリジナル回路のXBEE-1B1の部分を下図のESP-WROOM-02に置き換えます。 変換基板はユニバーサル・スルホール基板を8×9穴を残し切断し、裏側に6ピンのピンヘッダを取り付けます。 0.5mmのスズメッキ線でESP-WROOM-02と配線しますが、先ずヘッダ側12か所にスズメッキ線の先端をループ状にして ハンダ付けし、約7~8mmで切断します。次に変換基板にESP-WROOM-02を動かないように両面テープ固定しますが、 蜜着ではなく基板の切れ端等をサンドイッチ状に挟み固定します。これにより、適当な空間が出来て配線がし易く なります。後はスズメッキ線の先端をESP-WROOM-02の端子位置に合わせて整形、余りは切断してハンダ付けします。 変換基板はソケットを介して取り付けますが、画像を参考にして下さい。注意:私は8ピンソケットを使ってます。 No.36 B-ROBOT 3号機miniにプリント基板化の資料を載せましたのでご覧下さい。 |
|
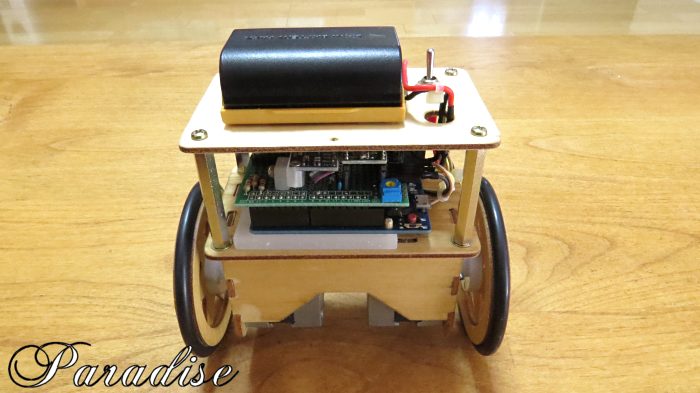
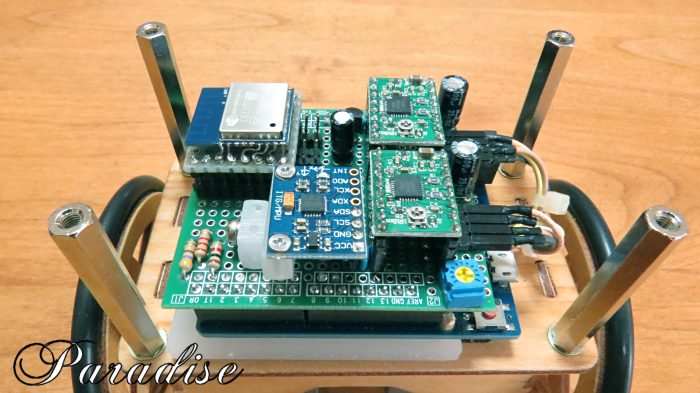
左側上青色基板:ESP-WROOM-02はICピッチが異なるので変換基板を介しての取り付けてます。 中央手前::MPU-6050ジャイロ基板、右側緑色基板上下:A4988モータードライバー基板 WiFiモジュール用に3.3Vの電源が必要ですが、マイコンの3.3V電源は容量不足で使えないのでバッテリー電源から 3端子レギュレター(容量150mA以上)を使って取り出します。5V電源はマイコンの5V出力が使えます。 |
|
電源には小型軽量のデジタルカメラ(CANONのLP-6Eの互換品)用7.2V約1800mAhのリチウムイオン電池を使いました。 この電池は充電をしておけば1時間以上遊べます。また、Lipo電池と違って発火の危険が少なく取り扱いも簡単です。 |

|
必要なソフトはjjrobots社のHPからリンクしたGitHubのページからライブラリーを含めた全てをダウンロードして下さい。 回路図もPDFで掲載されています。マイコンへsketchの書き込みはArduino IDEの最新版をダウンロードして行います。 コントロールに必要なスマホやタブレットのアプリ「touchOSC」は、Googleストアにて450円でダウンロード出来ます。 また、不明な事、判らない事はB-ROBOTのフォーラムが大変参考にります。 |
