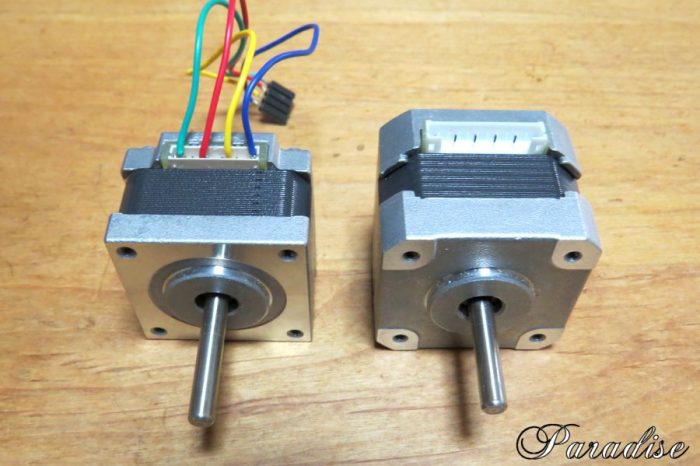
このステッピングモーターはステップ角1.8°巻き線抵抗15Ωの2相ユニポーラ型ですが、コイルの両端を使いバイポーラ接続として
使いました。小さいですが先のB-ROBOT 1号機・2号機と同様にキビキビと動き回ります。
大きさの比較 左:KH39FM2-022(コネクターが無いので配線を直付けしました。 右:2号機に使ったKH42HM2-801
|
今回は少し小さいステッピングモータ(オリジナルマインド社販売の中古未使用品、日本電産KH39FM2-022)を使った miniサイズのB-ROBOTをCNCを活用して作ってみました。 フレームは2号機と同じように5mm厚のアクリル板をCNCで切削加工して作りました。 制御部は、Arduino Leonardo系のマイコンPro MicroとモータードライバーA4988、ジャイロモジュールMPU6050、 WiFiモジュールESP-WROOM-02を、CNCでパターンを切削したマザーボードに載せました。 CNCをお持ちの方には、簡単に加工出来るようにDXF形式の切削データーを添付しましたので活用して下さい。 また、製作の前にMENUページのNo.34・No.35のB-ROBOT1号機・2号機と併せてご覧下さい。 先ずは、jjrobots社B-ROBOTのページを紹介します。jjrobots社では、B-ROBOTの回路図やsketchの他、 躯体の3Dプリンターのデータまで公開されていて、部品の完成品も販売されています。 B-ROBOTはリモコン操作にスマホやタブレットのWiFiを使いますが、完成基板のWiFiモジュールにESP-12Eを 使用のため、電波法の関係で日本国内で使用できません。 私は、ESP-12Eに替えて日本の技術基準適合証明が付いたESP-WROOM-02を使いました。 ここでは変更部分の回路図を掲載に留め、必要な回路図やソフトウエアーはjjrobots社HPを参照して下さい。 |
| マイコンArduino Pro Micro | alibaba:1個 467円 |
| ジャイロセンサー MPU-6050 | アマゾン:1個 324円 |
| ステッピングモータードライバ A4988 | アマゾン:2個セット1280円 |
| WiFiモジュール ESP-WROOME-02 [M-09607] | 秋月電子:1個 550円 |
| アルミ電解コンデンサー35V100μF 2個 | 秋月電子:1個 20円 |
| 3端子レギュレータ、3.3V150mA [I-09119] | 秋月電子:1袋2個 100円 |
| 片面生基板 100×150mm | 手持ち品 |
| Oリング1A-P48A 2個 | モノタロウ:1個68円+税 |
| ステッピングモーター KH39FM2-022 2個 | オリジナルマインド:1個 480円 |
| 基板用トグルスイッチ3P [P-00300] | 秋月電子:1個 80円 |
| ピンヘッダ 1X40(40P) [C-00167] | 秋月電子:1個 35円 |
| 分割ロングピンソケット1X42(42P)[C-05779] 2個 | 秋月電子:1個 80円 |
| ロープロファイルピンヘッダ(低オス) 1X40(40P)7.7mm [C-02900] 1個 | 秋月電子:1個 40円 |
| シングルピンソケット(低メス)1X14(14P)[C-C-00661] 1個 | 秋月電子:1個 50円 |
| アクリル板厚さ5㎜ 200×300mm | 手持ち品 |
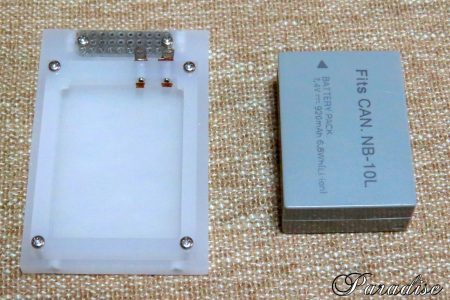
| デジカメ用バッテリー(キャノンNB10L互換品) | 手持ち品 |
| その他、抵抗・コンデンサー類、線材及びビス類 | 手持ち品 |
| ステッピングモーターついて |
|
今回は、少し小さい日本電産製のKH39FM2-022(未使用中古品)をオリジナルマインド社から購入したものです。 このステッピングモーターはステップ角1.8°巻き線抵抗15Ωの2相ユニポーラ型ですが、コイルの両端を使いバイポーラ接続として 使いました。小さいですが先のB-ROBOT 1号機・2号機と同様にキビキビと動き回ります。 |
|
モーターシャフトは長いので先端を10mmカットして使います。 大きさの比較 左:KH39FM2-022(コネクターが無いので配線を直付けしました。 右:2号機に使ったKH42HM2-801 |
|
今回はマイコンにPro Micro互換品を使い、モータードライブモジュール、WiFiモジュール、ジャイロモジュールを1枚の基板に 収めるマザーボードをCNCでパターンを切削して作りました。 しかし、片面基板なので少しジャンパー線の配線が必要です。 |
|
マザーボードのDXFファイル(ZIP)は「こちらからダウンロード出来ます」 マザーボードの配線図(バッテリー電圧監視用VR20Kはオプションとして取り付けてません)  以下にマザーボードの製作及び各モジュールと部品の組み付け手順を示します。 | |
|
マザーボードの切削パターン図 (CAMソフトCut2Dのデザイン機能を使って作成)  |
CNCを使ってPCBのパターンを切削 切削用Vビットは2mmエンドミルの折れたものを 再研磨して作ったので仕上がりは今一です。 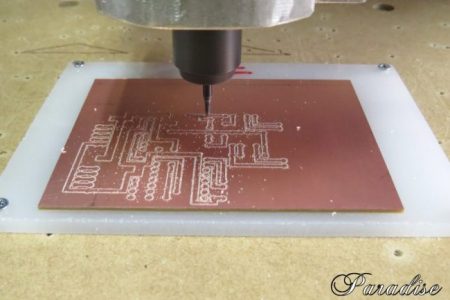 |
1)部品面のジャンパー線と抵抗の取り付け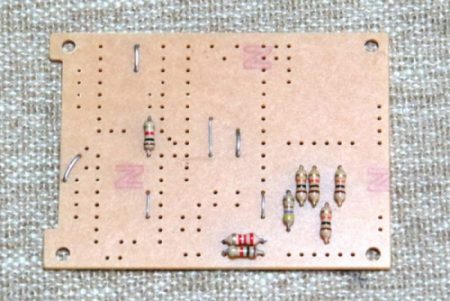 |
2)コンデンサー類の取り付け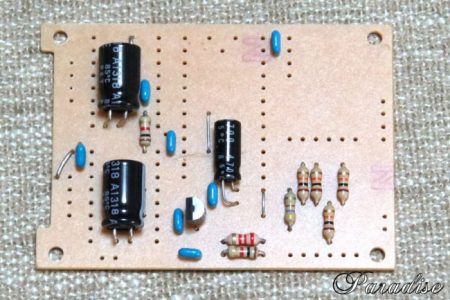 |
3)基板ソケットとプラグの取り付け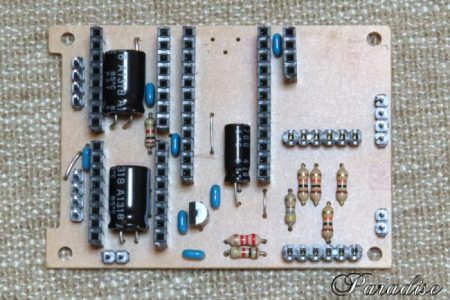 |
4)基板ハンダ面に5本のジャンパー線を取り付け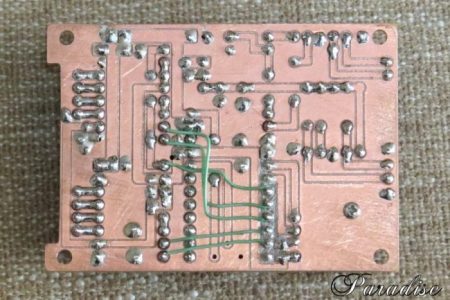 |
5)完成したマザーボードに収めた制御部(基板サイズ69×49.5mm)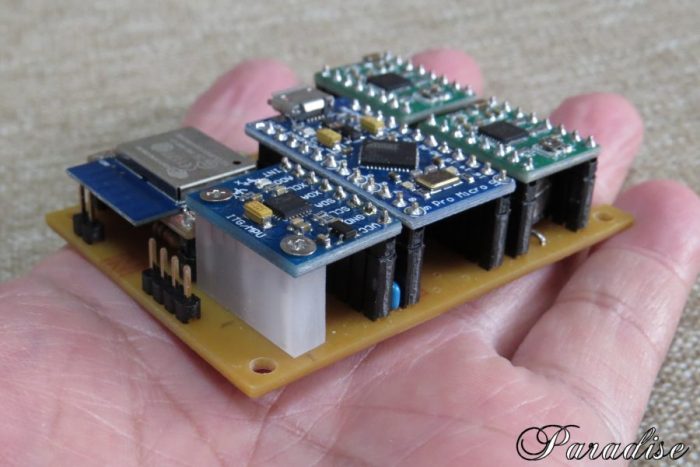 | |
| WiFiモジュールについて |
|
国内で使える技適証明が付いたESP-WROOM-02を使います。しかし、WROOM-02は1.5mmピッチなので2.54mmピッチに 変換する必要があります。専用の変換基板が市販されていますがサイズが大きいので、ここでは片面生基板にCNCで パターンを切削して作りました。 左:変換基板の切削パターン図、中央:パターンを切削した片面基板、右:変換基板にESP-WROOM-02をハンダ付け完成品  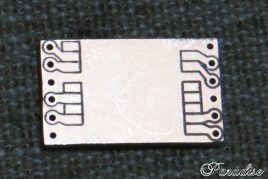  |
|
変換基板のDXFファイル(ZIP)は「こちらからダウンロード出来ます」 |
| ジャイロセンサーについて |
|
ジャイロセンサーMPU-6050をソケットを介して基板に取り付けますが、取り付け穴を利用して基板に水平に固定します。 |
| ステッピングモータードライバーについて |
|
ステッピングモーターは普通のモーターのように電圧を加えるだけでは回転しません。そこで活躍するのがモータードライバーの A4988です。 このドライバーの特徴はマイクロステップの設定がフルスッテップから1/16ステップまで選択出来ることです。 モーターのステップ角が1.8°なのでフルステップでは1回転に200ステップ、1/16ステップでは16倍の3200ステップ必要ですが、 分解能が16倍となり、きめ細かな制御が可能となり、モーターの消費電流も抑えられます。 ドライバーのICチップには放熱用のアルミ製の放熱器が付属しますが、B-ROBOTの回路では放熱器が無くても温度が上がら ないので取り付けてません。 ドライバーのモーター電源入力の入口に35V100μFのアルミ電解コンデンサーを取り付けます。 モータードライバーの電流調整:購入時の状態では電源電圧7.5Vにて1A近く流れるので基板上のVRにて調整します。 調整方法:組み上がり、倒立が完成すればバッテリーとシールド基板の電源端子間に電流計を接続し、片方のモーター端子を 外して倒立を行い、この時に流れる電流を250mAに調整します。もう片方も同様に調整しますが、左右の電流値を揃えます。 次に両方のモーターを接続した状態で測定すると約450mA程度に収まると思います。元の状態より電流が半減し、モーターの 温度も殆ど上がらず、倒立動作やスピードにも影響しませんでした。 |
|
アクリルフレームとホイールの製作 今回も友人から頂いた5mm厚のアクリル板をCNCで加工したもので、下の参考画像はCAD図面のコピーです。 フレームのDXFファイル(ZIP)は「こちらからダウンロード出来ます」  切削が終わったフレームとホイール  CNC加工以外に次の加工が必要です。 |
|
①側板にモーターと棚板取り付け穴に6.5mmドリルで皿ネジ用の沈め加工を行いますが、鍋頭ネジを使う場合は不要です。 ②下段棚板:マザーボード基板を設置する棚で2.5mm下穴4か所にM3タップを切ります。 ③上段棚板:電池とスイッチを取り付ける棚ですが、使用する電池に合わせて加工が必要です。 ④上下棚板の両端に図面寸法書きの位置に側板固定用のネジ穴加工を、2.5mm下穴深さ8mmを開けてM3タップを切ります。 ⑤ホイールハブに2.5mm下穴を開けてM3タップを切り、シャフト固定用のネジ穴加工をします。ホイールにアクリル接着剤を 使ってで貼り付けます。 |
|
ホイールも同じアクリル板をCNCで加工して作り、外周にはタイヤのOリング入る溝を加工しますが、 旋盤が無いのでボール盤を旋盤代わりに使い、丸ヤスリをバイト代わりにを使って溝を掘りました。 ホイールのDXFファイル(ZIP)は「こちらからダウンロード出来ます」  |
出来上がったフレームとホイール。 |
フレームにモーターと制御基板を取り付けた状態。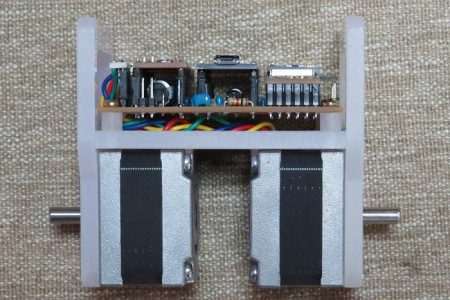 |
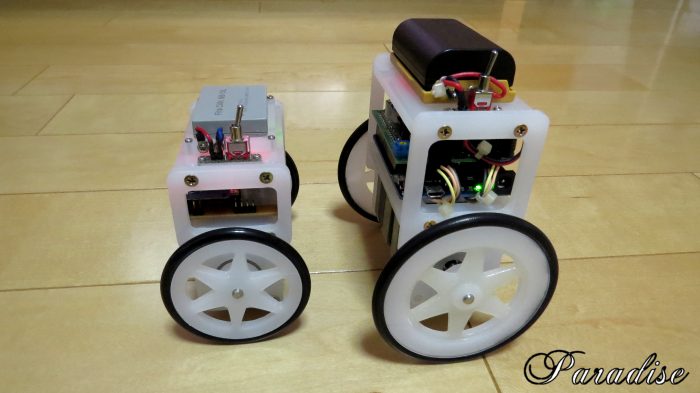
完成したB-ROBOT miniです。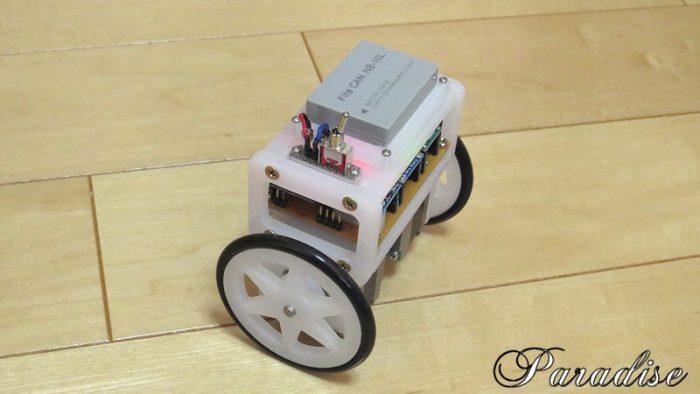 |
|
回路変更によるsketchの変更について |
|
オリジナル回路のマイコンをLeonardoからPro Microに替えたことによる変更点 ①MOTOR2のモータードライバーSTEP信号7番ピンの接続先D12がPro Microに存在しないのでPro MicroのD6に変更しました。 尚、この変更によりオリジナルsketchの一部、265行目と267行目の(PORTD, 6)を(PORTD, 7)に変更、さらに557行目の pinMode(12, OUTPUT);をpinMode(6, OUTPUT);に変更します。 ②バッテリーセンサーの接続先A5がPro Microに存在しないのでPro MicroのA3に変更しました。 尚、この変更によりJJROBOTSライブラリー内のJJROBOTS_BROBOT.cppの一部、92行目と94行目のanalogRead(5)を analogRead(3)に変更します。sketchの変更はこれ以外にありません。 |
|
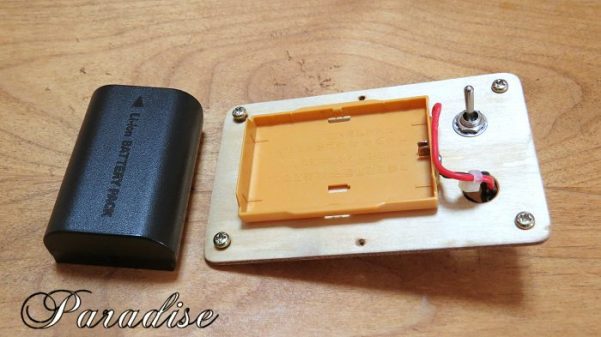
電源には小型軽量のデジタルカメラ用(CANONのNB-10L互換品)7.4V約920mAhのリチウムイオン電池を使いましたが、 1号機・2号機で使った(CANONのLP-6E互換品)7.2V約1800mAhのリチウムイオン電池が容量が大きくて良いですが、 他社のカメラ用電池でも電圧が7.2V前後の物が使えます。充電器が必要なので出来るだけ手持ちの物を活用して下さい。 新たに購入される方は、アマゾンなど通販サイトに格安の互換電池と充電器のセットが販売されています。 |

|
|
|
必要なソフトはjjrobots社のHPからリンクしたGitHubのページからライブラリーを含めた全てをダウンロードして下さい。 回路図もPDFで掲載されています。マイコンへsketchの書き込みはArduino IDEの最新版をダウンロードして行います。 コントロールに必要なスマホやタブレットのアプリ「touchOSC」は、Googleストアにて450円でダウンロード出来ます。 また、不明な事、判らない事はB-ROBOTのフォーラムが大変参考にります。 |
