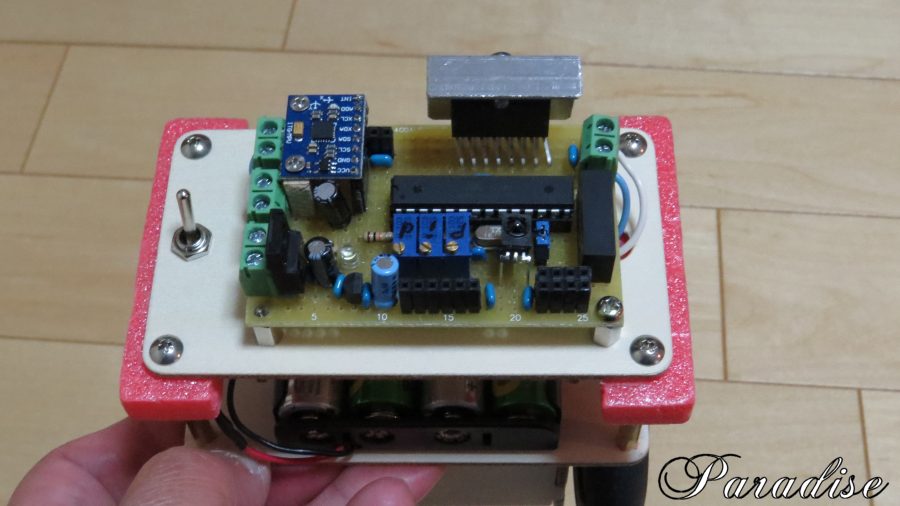
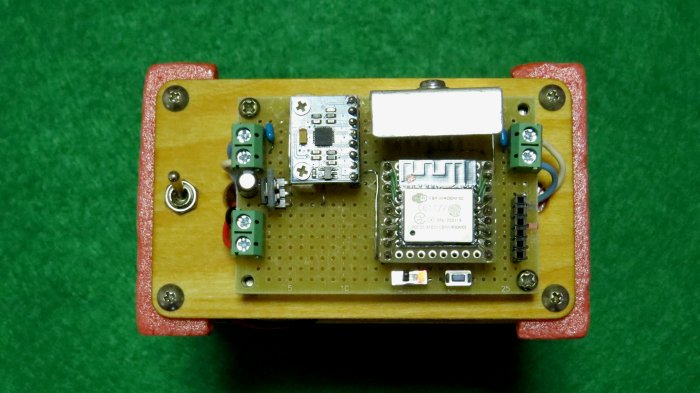
| 先ず。元の回路図と今回の回路図を比較してください。 ATmega328マイコンに替えてWiFiモジュールESP8266 WROOM-02を使った事により、回路が簡素化しました。 WiFiモジュールESP8266にはマイコンが内蔵されていますが、タイマーやレジスター等がArduino系と 異なるため、最近の倒立ロボットB-ROBOTやYABRのような安定性が望めません。 しかし、安価で入手し易い模型用ギヤーボックスやWiFiモジュールを使って簡単に倒立ロボットの実験が 出来てIoTの勉強になると思います。 |
| WiFiモジュール ESP-WROOME-02 | 秋月電子:1個550円 |
| ジャイロセンサー MPU-6050 | アマゾン:1個160円~色々 |
| モータードライバ L298N | 秋月電子:1個350円 |
| 3.3V800mAレギュレータ基板 | アマゾン:5個 170円 |
| 片面ユニバーサル基板 | 秋月電子:1個60円 |
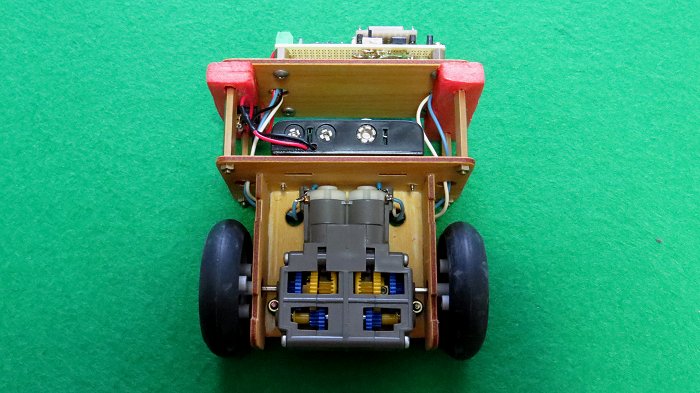
| タミヤ No.168 ダブルギヤボックス 左右独立4速タイプ | アマゾン:615円 |
| タミヤ 楽しい工作シリーズ ナロータイヤセット(58mm径) | アマゾン:390円 |
|
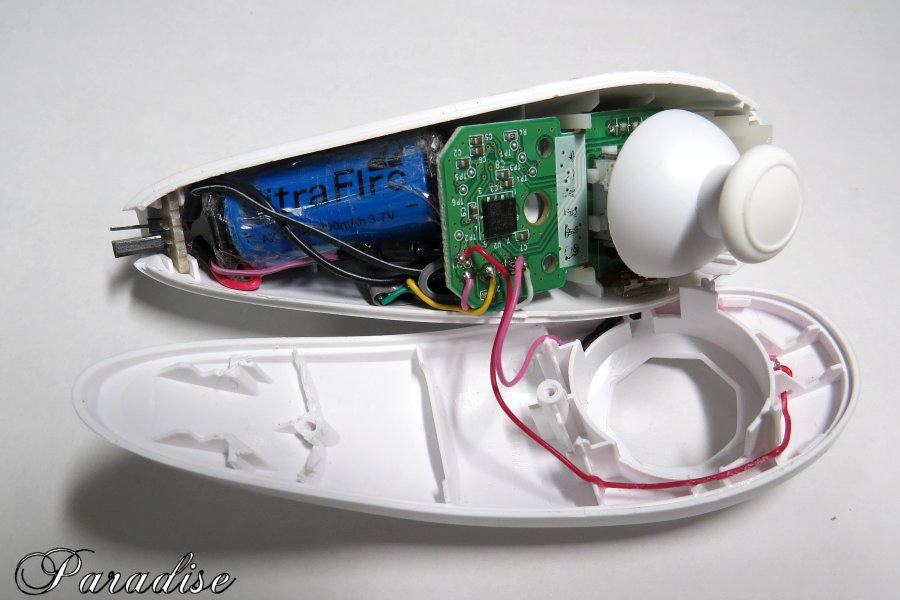
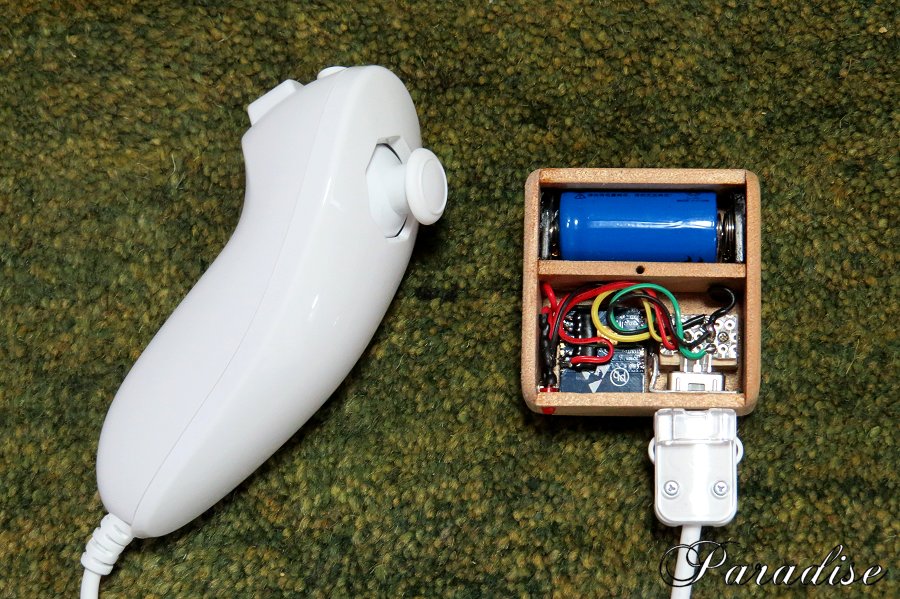
WiFiコントローラーには、No.39 「WiFiモジュールを使ったロボその2」で使った任天堂Wiiのヌンチャクを 改造した物を使いました。No.39と併せてご覧ください。 |
|
上記のヌンチャクを使う方法以外に、スマホのOSCアプリを使って倒立ロボットのコントロール出来ます。 その方法はNo.47のWABRの項を参考に、TouchOSCアプリのXY pad設定値を0~127を0~255に変更するだけです。 この場合、受信側のSketchをOSC用に差し替えます。(OSC用Sketchを開く) |
