参考資料:私の回路図
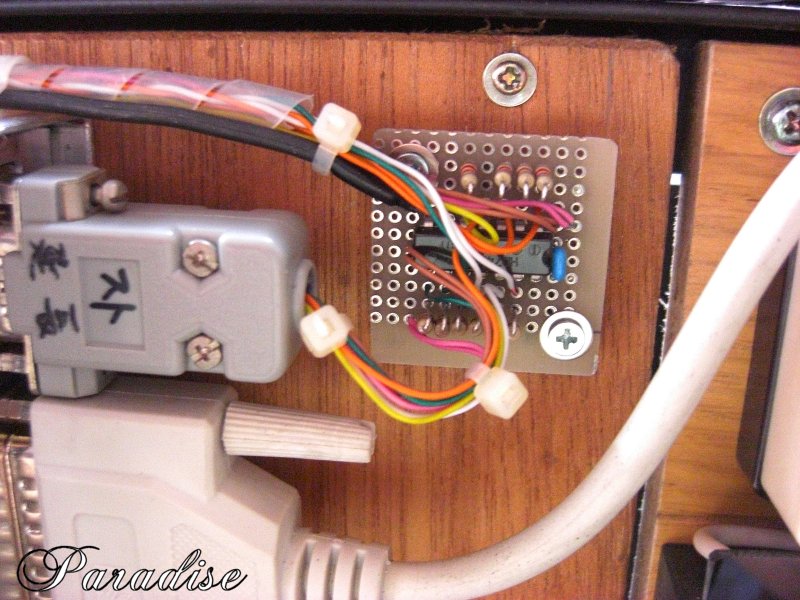
入出力回路(試作は基板端子直付)
X軸センサー取り付けの様子
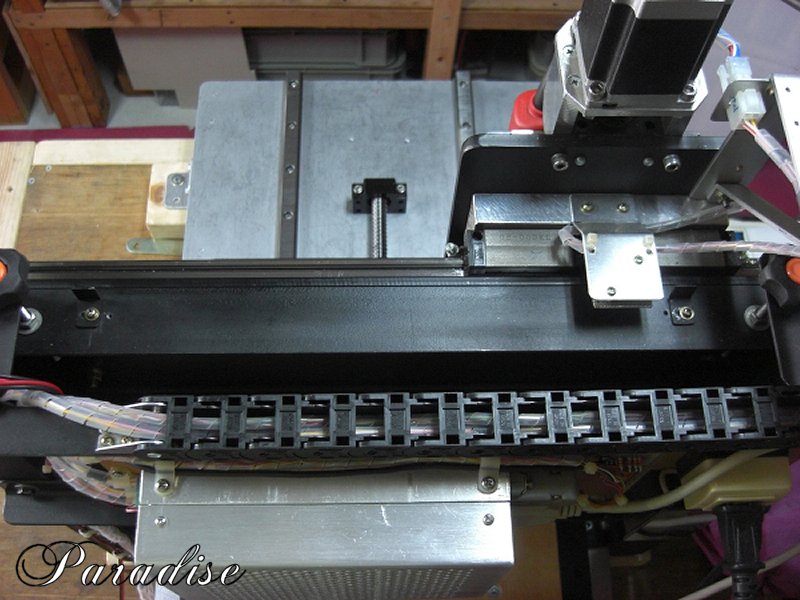
Y軸を前側から見たところ

Y軸を後ろ側から見たところ

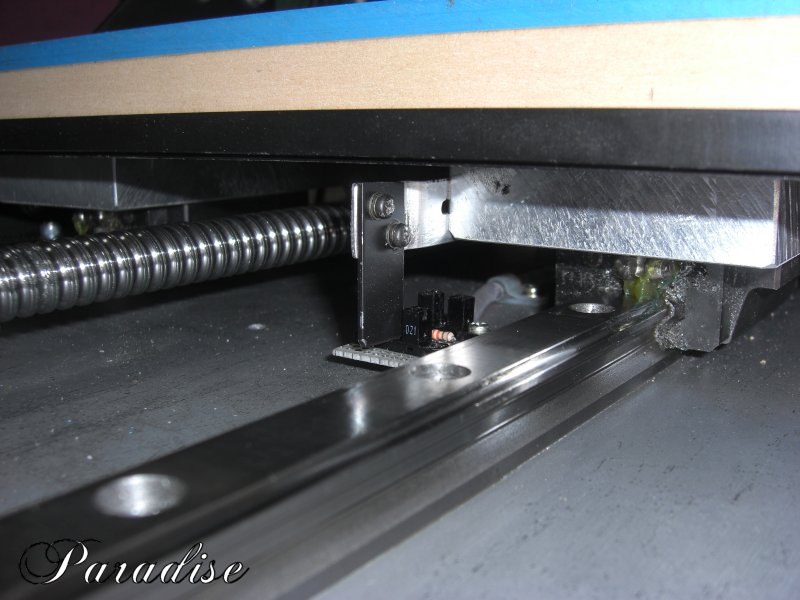
Z軸センサー取り付けの様子
この方法では、各軸一組のセンサーで両端のリミットとホーム位置を検出します。センサー基板にはフォトセンサーを2個並列 に配置します。また、センサー基板はX軸が移動側、Y軸とZ軸が固定側に設置しました。 X軸の右端にホーム位置を設けた場合を例に説明します。 センサー基板を移動体の中央に設置し、左側をリミットSW、右側をホームSWとします。 また、軸の両端より少し内側にリブ (遮蔽板)を設置しますが、左右に移動(微調整用)できるように工夫します。 動作:アプリケーションのホームボタンを押すとセンサー基板が右に移動し、右端に来るとリブに遮られてホームSWが働き停止 します。 また、ホーム動作以外では右端に来てもホームSWが無視され、さらに進むとリミットSWが働いて停止します。 次にセンサー基板が左端に来るとリミットSWが先に働いて停止します。 Y軸の場合はセンサー基板を移動範囲のベース側中央に固定し、リブを移動体(テーブル)の両端に設置してます。画像参照 切削プログラムは、ワーク範囲を両端のリミットSWが作動する範囲内に設定する必要があります。 今は試作なので手配線ですが、CNCで生基板から製作中で完成後に置き替える予定です。
参考資料:私の回路図 |
入出力回路(試作は基板端子直付) |
X軸センサー取り付けの様子 |
Y軸を前側から見たところ |
Y軸を後ろ側から見たところ |
Z軸センサー取り付けの様子 |
