
|
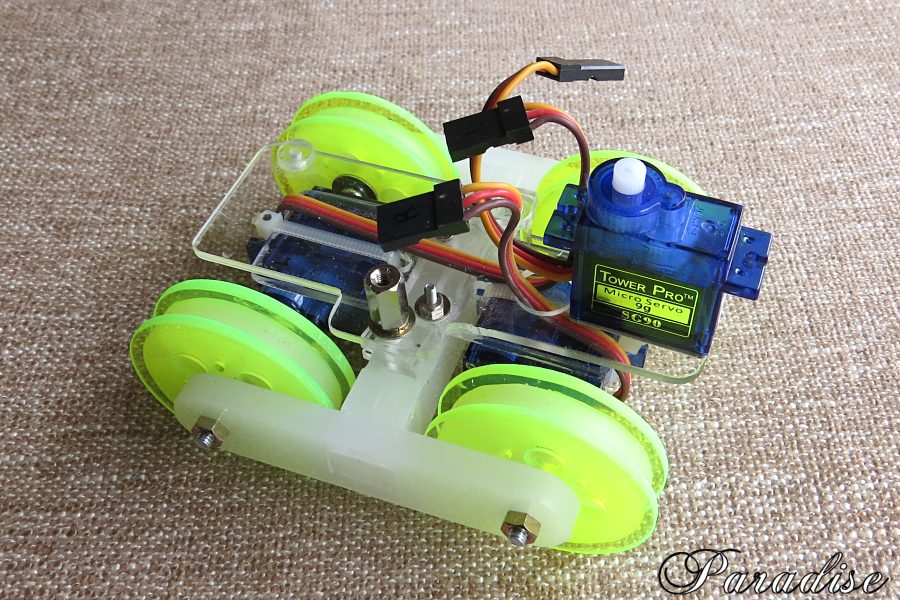
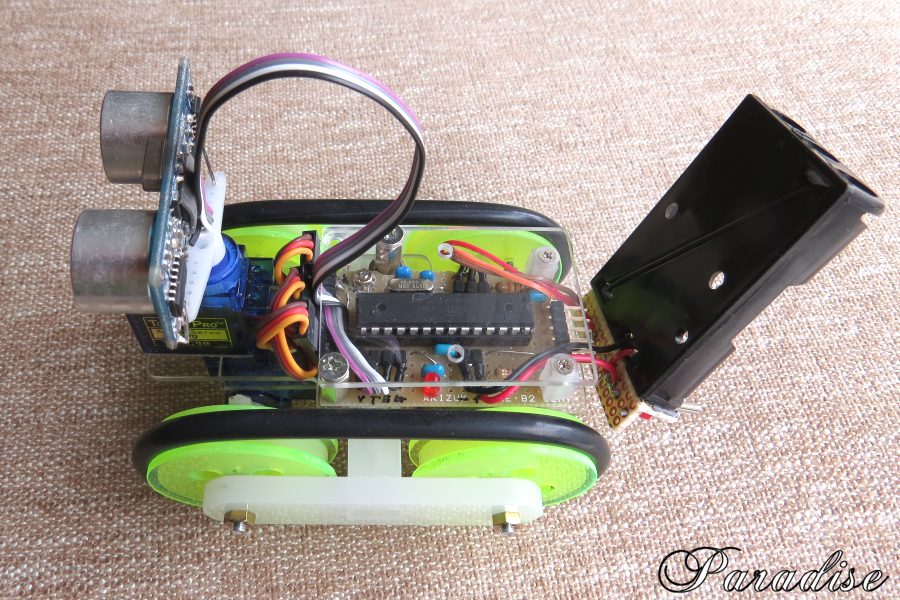
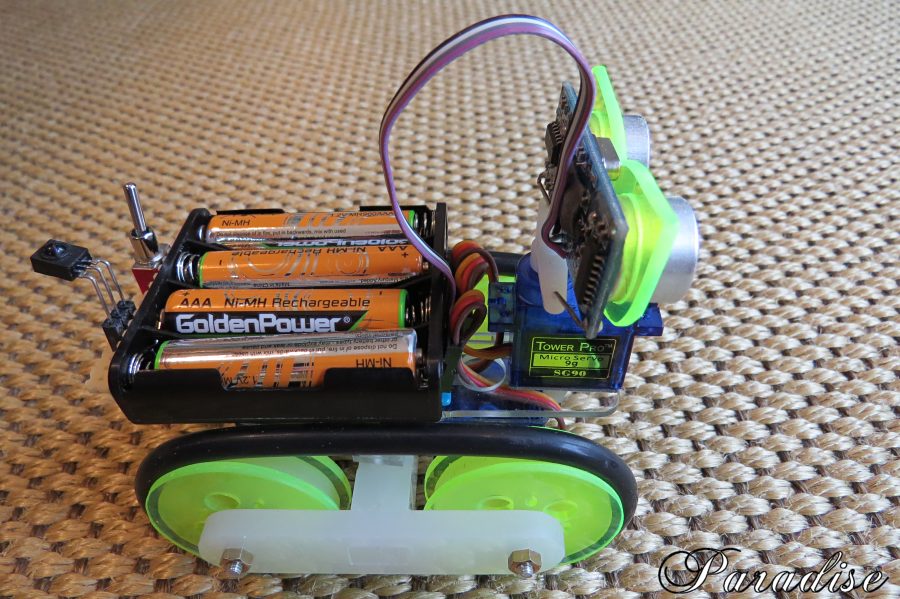
マイクロサーボモーターSG90を連続回転に改造し、駆動用モーターに使った超小型の無限軌道車を作りました。 今回の作品はアクリル板をCNCフライス盤を使いフレームやローラーを作り、クローラーにはOリングを使った 簡単な構造です。 小さなサーボモーターに直接ローラを付けると負担が大きいのでフレームを強固に作り、 サーボモータには回転以外の負荷が掛からない構造としました。 サイズL10cm、W7cm、H9cm この作品は超音波センサーを用いた自律走行とテレビ用の赤外線リモコンを使った手動運転が出来ます。 |
| 購入部品 | |
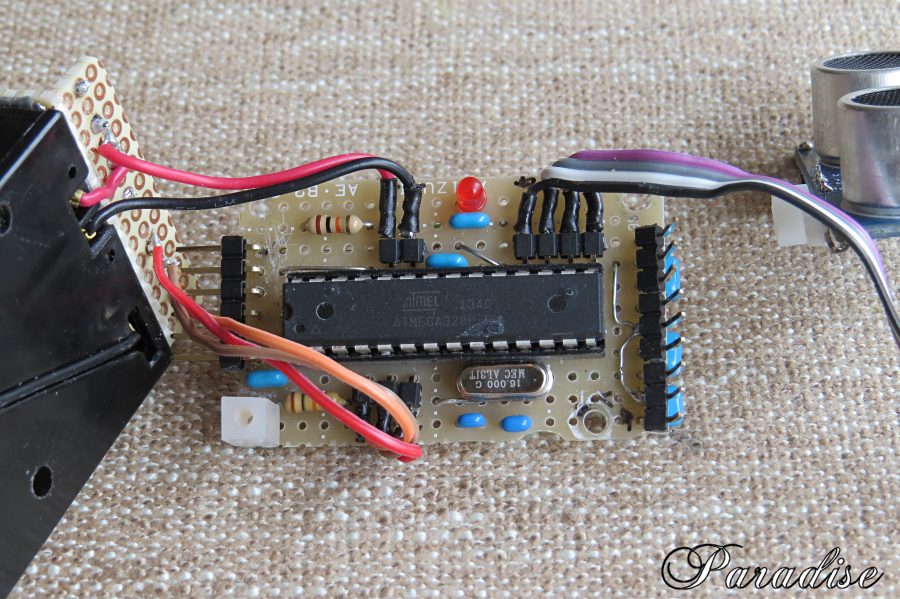
| AVRマイコン ATmega328P | 1個 |
| 16MHz水晶発振子 | 1個 |
| マイクロサーボ SG90 3個 | 秋月電子:1個400円 |
| 超音波センサーHC-SR04 | 1個 |
| クローラー用Oリング 1AP-65 線径5.7mmリング内径64.6㎜ | ヨドバシカメラ:2個696円 |
| シャープ赤外線受信モジュール GP1UXC4 | 1個 |
| ユニバーサル基板 | 1枚 |
| ニッケル水素充電池単4型 | 4個 |
| 単4型電池ボックス4個用 | 1個 |
| 基板用トグルスイッチ3P | 1個 |
| 基板用丸型M3スペーサー(外径6mm) | 10mm×4個 |
| アクリル板公称5㎜(実際は5mm前後) | 200×300(mm)1枚 |
| アクリル板公称2㎜(実際は2mm前後) | 200×300(mm)1枚 |
| 表示用3mmLED | 3個 |
| その他CR類及び線材、インシュロックタイなど | 少々 |
| マイクロサーボモーターSG90を連続回転にするための簡単な改造が必要です。 自己責任でお願いします。初めての方は写真を撮りながら進めて下さい。 |
| ①先ず、銘板と検査シールを剥がし、サーボモーター本体裏側の4本のネジを外すと本体が三つに分かれます。 |
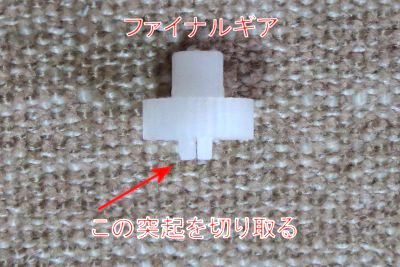
| ②上部カバーを外すと4個のプラスティックギアが見えますが、ギアの位置を覚えておきます。良く似たギアがありますが、ポテンションメーター のシャフトとカウンターシャフトは太さが異なり、ギアのピッチも異なるので間違うことは無いと思います。 ファイナルギア(サーボホーンの付くギア)は、ポテンションメーターのシャフト上部に固定されていますが、ギアを強く回すと簡単に外れます。 |
| ③ファイナルギア下側付いてるストッパー用突起をニッパー等で切り取り、バリも取り除き綺麗に仕上げます。 |
  |
| ④ポテンションメーターのシャフトとファイナルギアが軽く回るようにギアの内径を少し広げます。 1.4mm径のドリルが有れば簡単に広げられるが、ポテンションメーターのシャフト先端部をヤスリとペーパーで少し細くする方法もあります。 何れの場合もファイナルギアを固定するためにシャフト先端に付けられた傷を修正する必要が有ります。 |
| ⑤今度はマイコン等の信号源からサーボ角度が中央90°の停止信号を入力し、モーターの回転が停止する位置にポテンションメーター の角度を合わせます。この作業を正確に行わないと停止時にどちらかの方向へ少し回転するので注意が必要です。 ポテンションメーターの位置が決まれば、瞬間接着剤などでポテンションメーターが動かないように固定します。 (この作業はモーターに信号を入力後2分程経過し、モーターが安定してから行います。電源投入後は不安定です) この調整が面倒な方は、ポテンションメーターを5KΩのを半固定VRに置き換えて外付けにすると、外から微妙な調整が簡単に出来ます。 |
| ⑥次に上部のギアを元通りに組み付け、(グリスの塗布を忘れずに)上下のカバーを4本のネジで締めれば完成です。 |

#include |
