|
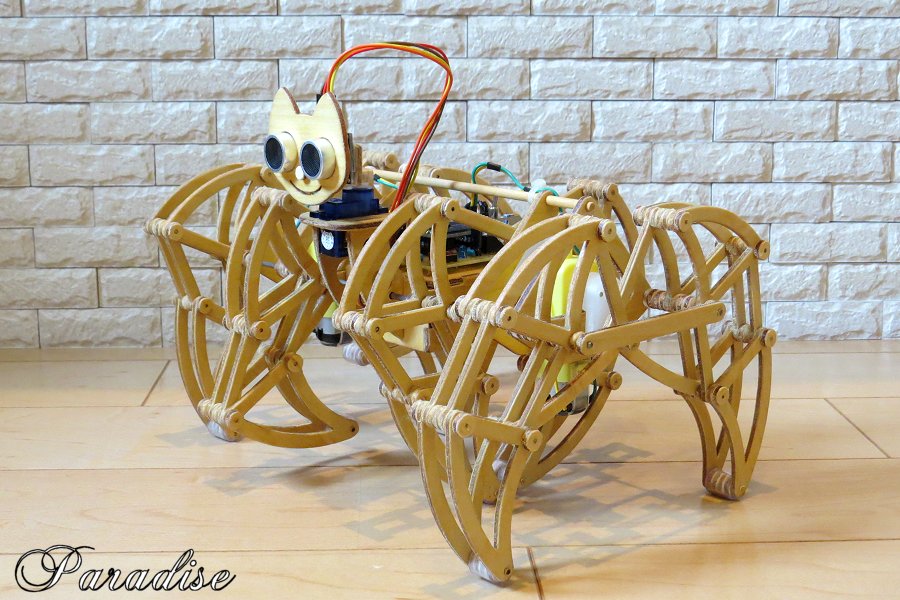
テオ・ヤンセン・メカニズムを応用したラジコン・ロボットの続作ですが、ロボット側とコントローラー側の双方に 超小型WiFiモジュールESP8266 WROOM-02(技適適合品)を使い、UDPパケット通信で制御しました。 また、これまではコントロール側にスマホやタブレットを使ってましたが、専用のコントローラーを使うのが この作品目玉です。使う度にアプリを開いて設定する手間が省ける利点があり、子供でも使えます。 |
|
私はこれまでにソーラーパネルを載せた作品やサボニウス型風車を付けた作品を作ってきましたが、やはり、 自分で障害を避けて歩く自律型が面白くてこの作品を作りました。構造の基本は先のWIND BEESTと同じです。 テオ・ヤンセン・メカニズムについては、No.23~No.25の記事を併せてご覧ください。 |
|
今回も本体の材料を厚さ3㎜シナベニヤを使いました。ギヤモーターには以前に1個400円ほどで買ってストック してた中国製の黄色いモーター(型番は不明ですが電圧3V、50r.p.m)を使いましたが、何時でも入手可能なタミヤ ミニモータ付き低速ギヤボックスをお勧めします。 |
|
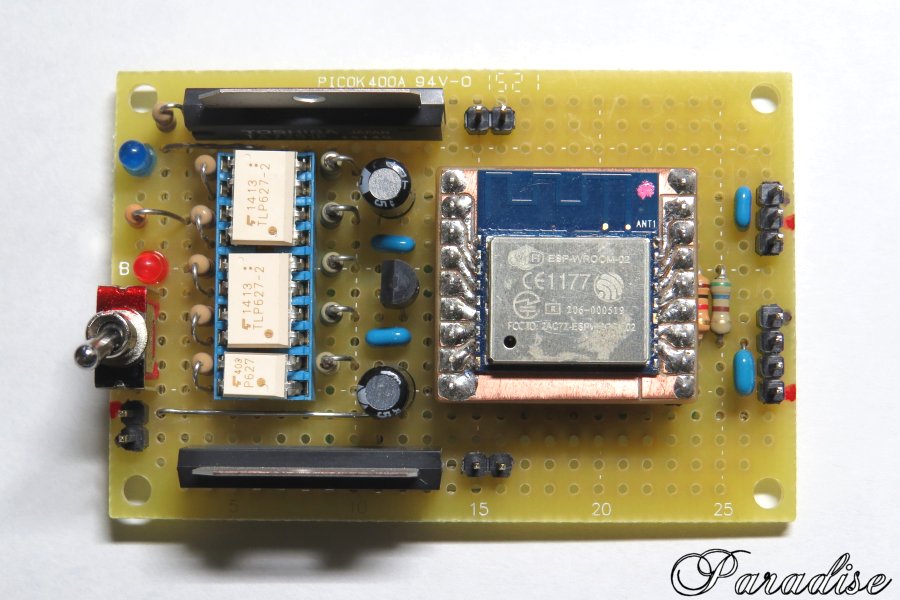
心臓部はWiFiモジュールESP-8266 WROOM-02(技適証明付き)を使い、前記事No.37に紹介しましたNodeMCUを 使ってSketchを書き込んでいます。 この回路では、WiFiモジュール系が電圧3.3V、モータドライバーの制御系が5Vのため、フォトカプラーを使い系統を 分離ししました。 尚、5V系電源(モーター電源も同じ)にはUM-4 単4型充電池を4本使います。3.3V系は5V系から3端子 レギュレータ(容量150mA以上)を使います。この回路を下の画像のように小さなユニバーサル基板に組み込みました。 超音波センサーSC-SR04も5V仕様ですが、トリガー入力はWiFiモジュールから直接入力しても問題ありませんが、 エコー出力は、560Ωと1KΩで分圧して信号レベルを3.3Vに変換してからWiFiモジュールに入力してます。 また、サーボモーターも5V系なのでフォトカプラーを経由して信号レベルを5Vに変換してから入力してます。 |
|
WiFiモジュールとスイッチだけのシンプルな回路です。ソフトウエアの開発に時間が掛かりましたが、やっと完成しました。 最初はOSC(Open Sound Control)互換で作ってたのですが、途中からスイッチのイベントをUDPパケットに載せてホスト側に 一方的に送信するだけの簡単なSketchとしました。準備が出来次第掲載しますのでご期待ください。 |
|
スイッチ部:タクトスイッチを木製の円盤で押し下げるだけの簡単な十字スイッチを作りました。 車型ロボットの場合はジョイスティック式の方が有利ですが、この歩行型ロボットの場合はスイッチ式が良いと思います。 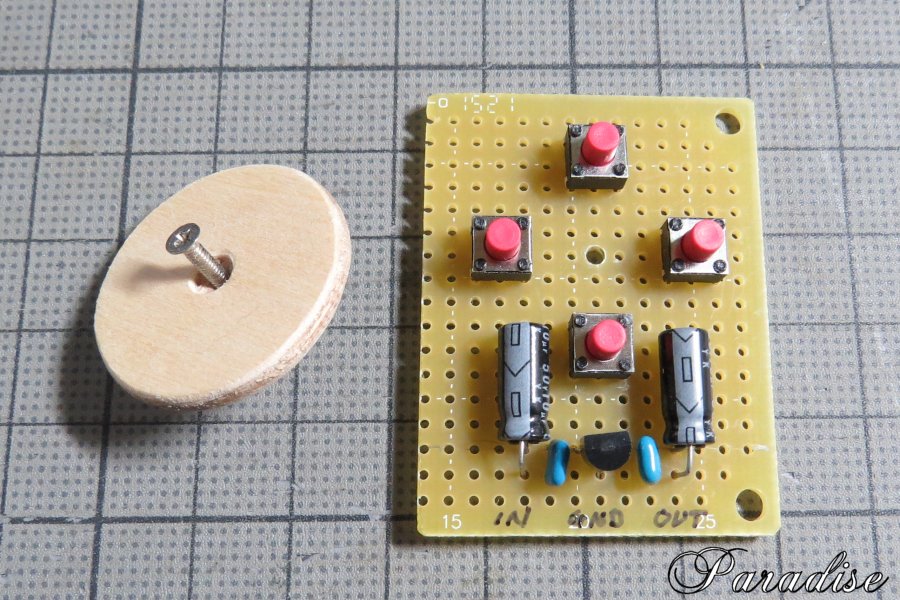 左から:ESP8266 WROOM-02基板、スイッチ基板、デジカメ用3.7Vリチウムイオン電池。 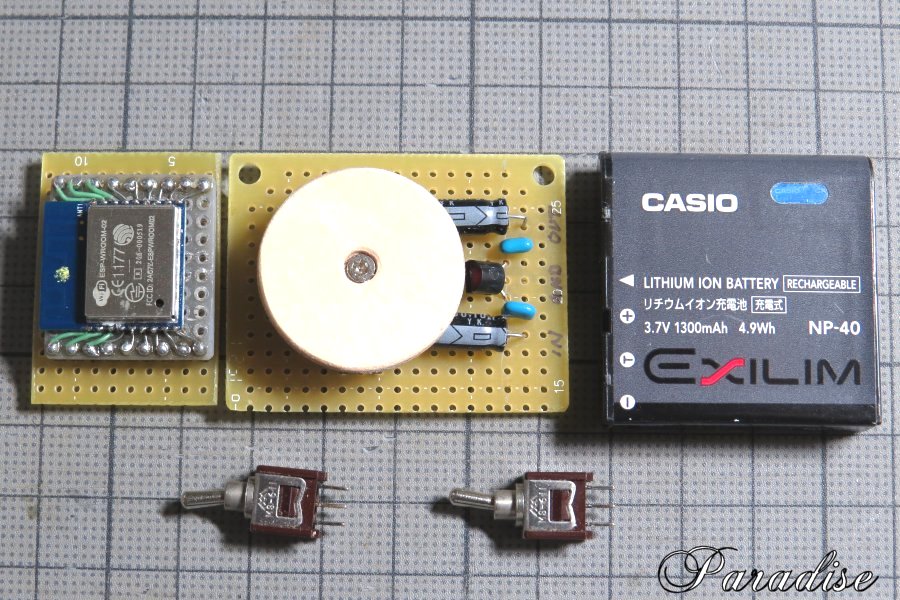 木製ケースを自作して基板を電池を実装しました。(ケースの材料にはアガチスを使いました) 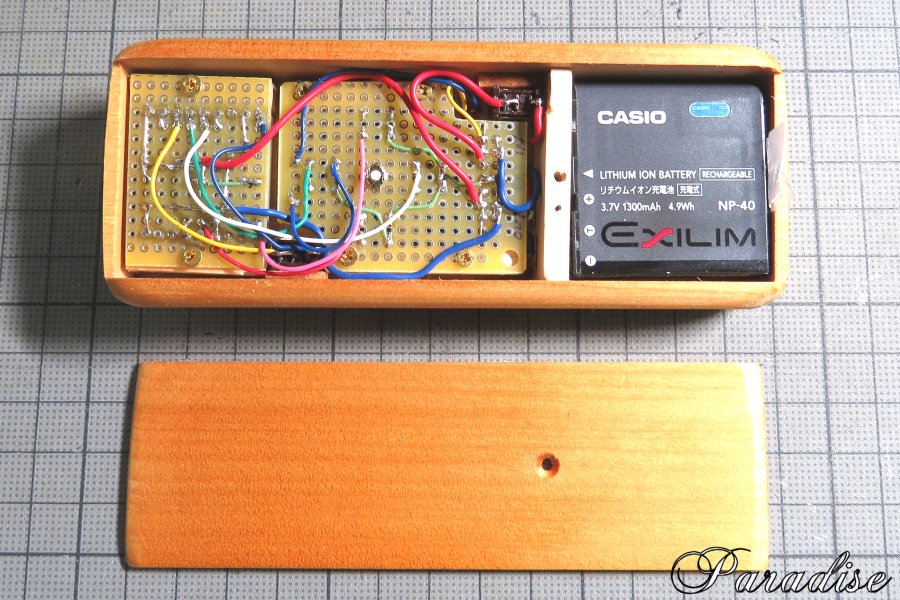 出来上がったコントローラーはガラケイより少し長いだけです(サイズの比較)。(文字は焼きペンで記入) 左側のスナップスイッチとLEDが電源用、右側のスナップスイッチがモードスイッチで自律歩行と手動操作の 切り替え用です。中央の円盤が手動操作用十字スイッチです。スイッチを押してる間、前後左右に移動します。  送信部のESP-8266 WROOM-02用Sketchを開きます。 |