|
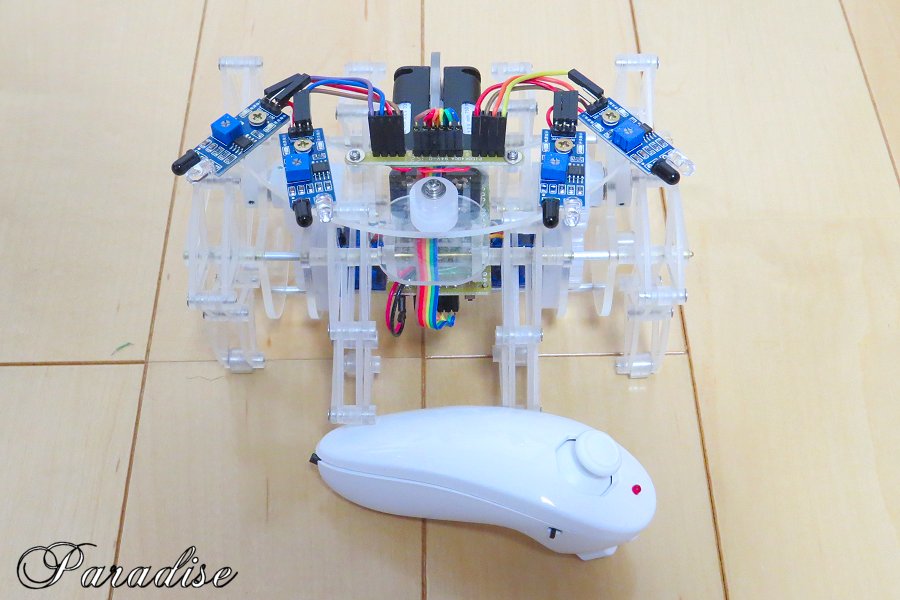
テオ・ヤンセン・メカニズムを応用したラジコン・ロボットの続作ですが、ロボット側とコントローラー側の双方に WiFiモジュールESP8266 WROOM-02(以下、WiFiモジュールと表記)を使い、スマホを使わないWiFi通信を実現しました。 今回の目玉は本体の小型化とWiiヌンチャクを改造したWiFiコントローラーです。 これによりジョイスティックを使って コントロール出来るようになりました。また、今回は自律歩行の障害物監視に赤外線センサーを初めて使用しました。 (開発中、WiFi通信の不通がソフトウエアではなく、WiFiモジュールの不良が原因だと気づかずに苦労しました) |
|
TJ-8ロボット本体は2㎜厚のアクリル板を使い、これまでの作品よりサイズを70%縮小しました。 今回は小型化したのでギアモーターが使えず、マイクロサーボモーターをロータリー型に改造して使用。 (マイクロサーボモーターの改造方法はNo.33手のひらに載る超音波自律走行・超小型無限軌道車の製作をご覧ください) サーボモーターは片軸出力なので1対1のギアを使い両軸出力に変換してクランクを回します。これにより、隣接する脚との 間隔を短縮し、JT-8全体の幅を縮小することが可能となりました。 電源には単4型ニッケル水素充電池を4個使って約5Vを得ています。基板は電池の裏側(下側)に取り付けました。 2㎜厚アクリル板の切削画像(この画像は実寸ではありません)DXFファイルは「こちら」) 部品点数が多いので加工が大変ですが、各自のワーク範囲に収まるように部品を配置して切削してください。 コンロットアームのAとBは同じ寸法です。A・C・Dは片方の穴が少し大きいので組み立て時に注意が必要です。 スペーサーのAとBも内径が違います。小さくて紛失するので少し多めに加工しておきましょう。 今回は脚の関節ピンにステンレス製の釘1.8㎜径を、前後と底部の貫通シャフトには2㎜径の真鍮丸棒を使用しました。 また、貫通シャフトにはスペーサーを兼ねた外径3㎜のアルミパイプを被せてます。 |
|
3㎜厚アクリル板の切削画像(この画像は実寸ではありません)DXFファイルは「こちら」) 3㎜板はギアーBOXや中央架台とIRセンサー取り付け台など骨格となる部品です。 2㎜板のバッテリー台と基板取り付け台を中央架台にサンドイッチ状に装着、中央架台とIRセンサー台を接着します。 |
|
5㎜厚アクリル板の切削画像(この画像は実寸ではありません)DXFファイルは「こちら」) ギアーとクランクの部品です。クランクの加工や全体の組み立てはNo.24のWIND BEESTを参考にして下さい。 上部ギアーハブにクランクシャフト固定用M3のイモねじ穴を加工(クランク加工と同様)して上部ギアーと接着します。 下部ギアーにはサーボホーンを埋め込む深さ2.5㎜のポケット加工を施し、エポキシボンドで接着するか 小さなねじで固定します。部品点数が多くて小さいので組み立てが難しいと思いますが作り甲斐のあるモデルです。 |
|
WiFiモジュールの3.3Vとサーボモーター5Vの混合回路ですが、トランジスタによる電圧変換により シンプルな回路となりました。また、WiFiのコネクトを知らせるLEDも追加しました。 また、障害物監視用センサーに安価な赤外線センサーを4個使い、前面と斜め左右を監視してます。 |
|
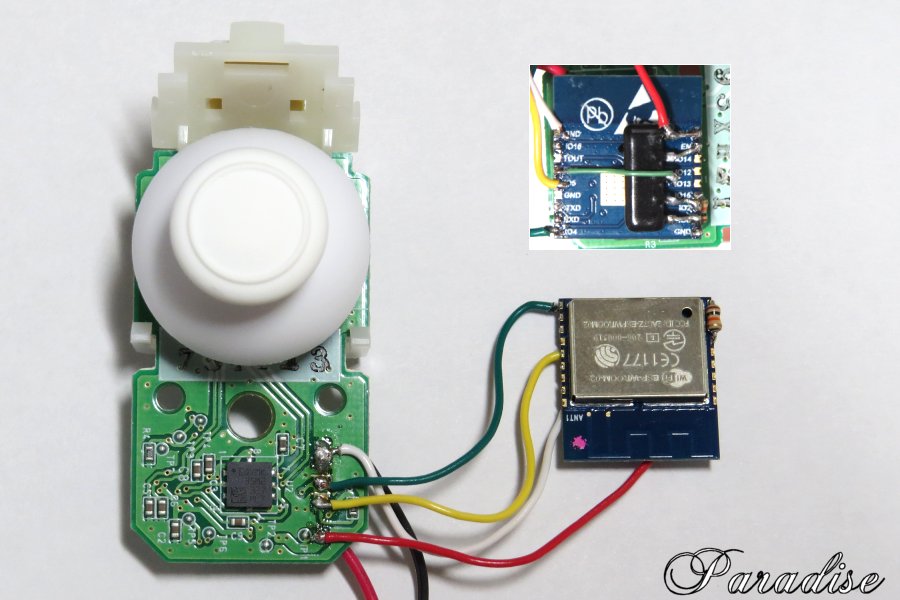
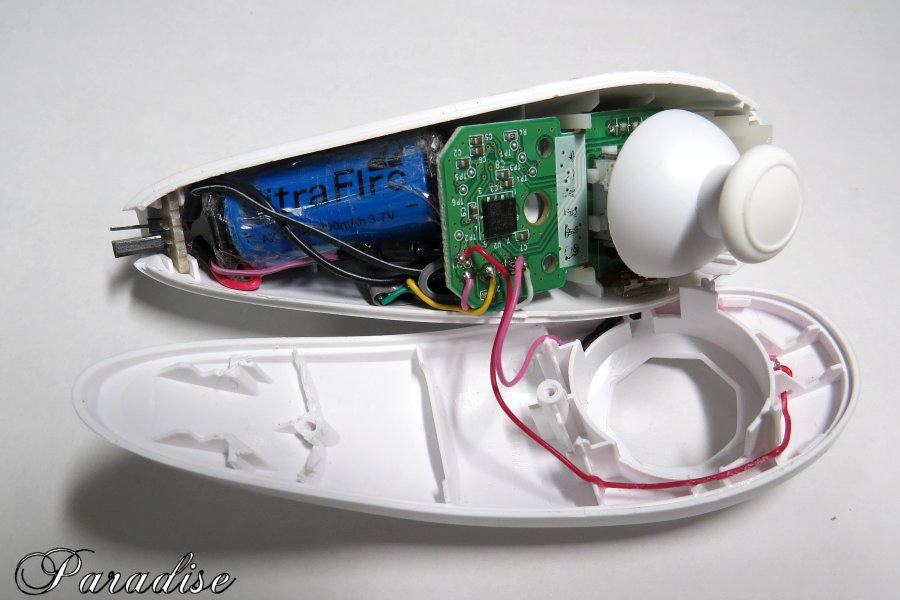
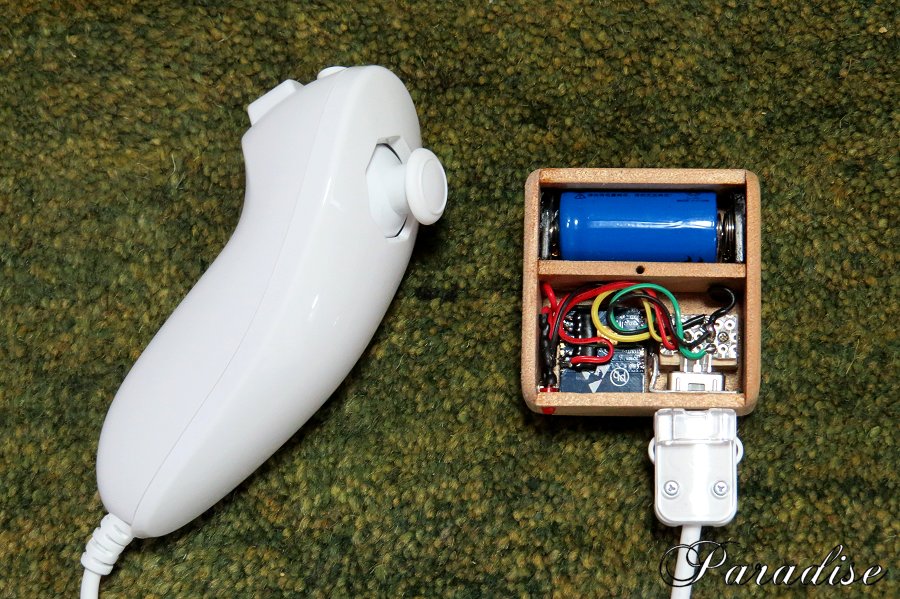
今回の目玉となるWiiヌンチャクのアナログジョイスチック使ったUDPパケット送信回路です。 Wiiヌンチャク本体にリチウムイオン電池とWiFiモジュールを組み込み、TJ-8をリモートコントロールします。 ヌンチャクはWiiリモコンとI2C通信を使って結ばれています。Webで見つけたヌンチャクのI2C出力をシリアルモニター に表示するArduino用Sketchを応用し、ジョイスチックデータをWiFiモジュールを使ってホスト側へ送ることが出来ました。 |
|
1)調整 調整1:IRセンサーの反応距離の調節は、IRセンサー前の目標距離に遮蔽物を置き、基板上のVRを回して変更します。 私は前方のセンサーを20cm、左右斜め方向は25cmに設定してます。 調整2:自律歩行モードの旋回時間の設定はSketchの「const int turntime = 400; 」の数値変更により可能です。 調整3:その他、Sketchのvoid Automatic_Control() { 内のdelay(***);を変更することにより、自律モード時の動作を各自の 好みに合わせた変更が可能です。 2)操作 TJ-8には手動歩行モードとIRセンサーによる自律歩行モードがあります。 操作1:先ず、本体とコントローラー(リモコン)の電源を入れます。暫くしてコントローラーと本体のWiFiがコネクトすると 本体のコネクトLEDが点灯します。 操作2:この状態でコントローラーのジョイスティックを進行方向に倒すとその方向に歩みだし、手を放すと止まります。 操作3:次にコントローラーのZボタンを押すと、IRセンサーのLEDが点灯して前方へ歩みだします。 例えば前方右側に障害物があり、IRセンサーが反応すると一旦停止の後少し後退した後、少し左へ旋回後再び前進を 始めます。(IRセンサーは結構電流を消費するので自律歩行モード時のみ動作するように回路を組んでます) 操作4:自律歩行モードから手動歩行モードに戻すにはCボタンを押します。 注意:動力にマイクロサーボモーターを連続回転化して使うので、長時間の連続運転はモーターの過熱や破損の原因となります。 そのため、電源バッテリーに容量が少ない単4型充電池を使ってますが、電池の容量が下がると異常な動作をするので 早めの充電が必要です。アルカリ電池は電圧が高いので使用禁止です。 |