|
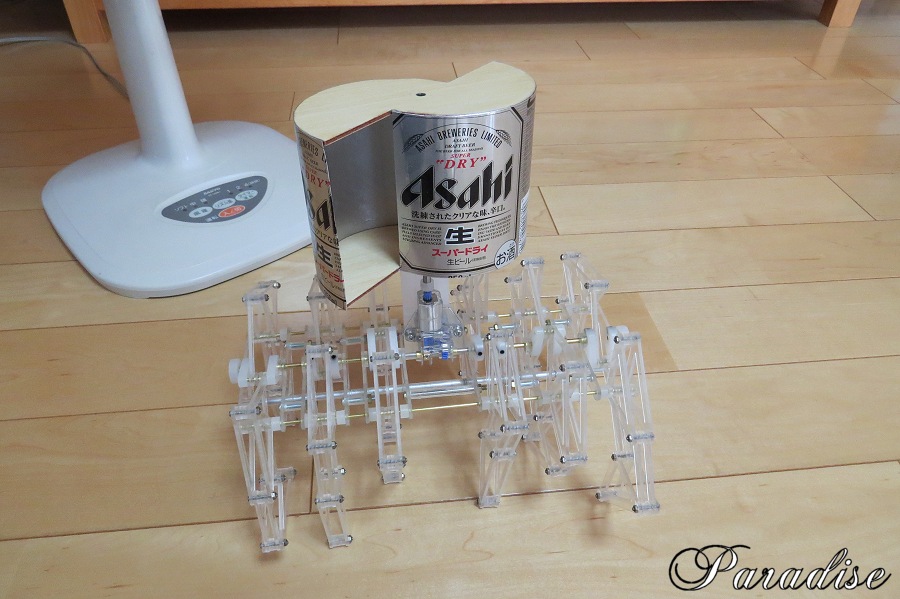
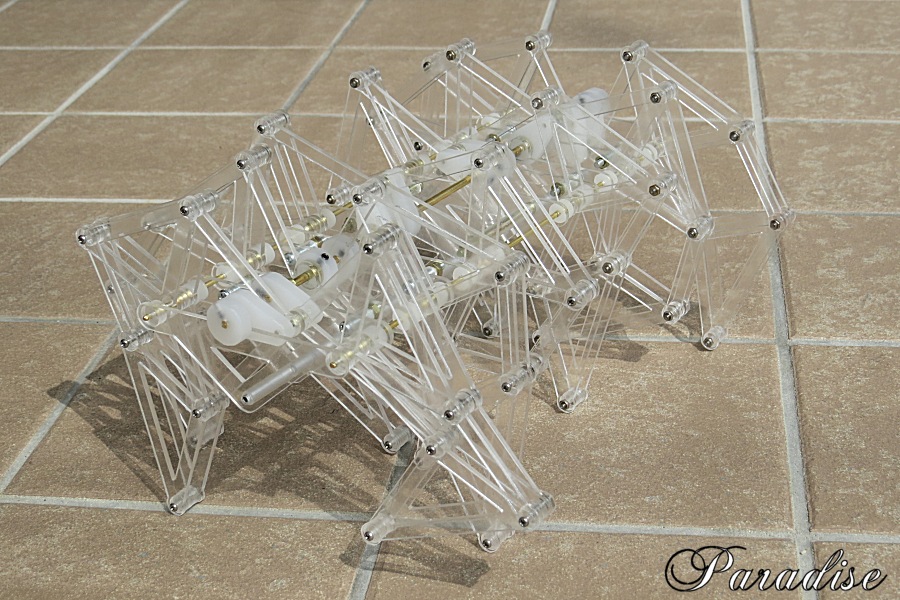
テオ・ヤンセン氏の設計思想は、モーターや他の動力を使ってクランク軸を駆動するのではなく、本体に 自然の風を受けて動かすことです。この思想からすると先に記したWIND BEESTやRC BEESTは邪道だと 思い、基本に戻ってテストを行いました。 No.23:WIND BEESTの編集後記で記したことの実証を目的にアクリル板を加工して3作目を作りました。 テストの結果、本体に少しの力を加えるだけで滑らかに歩むことが判り、テオ・ヤンセン氏の設計が 如何に凄いか体感しました。 |
| 公称2㎜厚アクリル板 | 300X225(mm) 4枚、又は600X450(mm) 1枚 |
| (私は手持ちの透明板を使いましたが、新たに購入される方は 半透明のカラー板の方が美しいです) | |
| 公称5㎜厚アクリル板 | 200X100(mm) 1枚 |
| 2㎜径真鍮丸棒(A) | 1m 1本 |
| 3㎜径真鍮丸棒 | 1m 1本 |
| 3㎜径真アルミパイプ(B) | 30cm 1本 |
| 5㎜径ABS丸パイプ | 1m 1本 |
| M2X15mmボルト・ナット | 各60個 |
| M3X18mmボルト・ナット | 各8個 |
| M3X70mmボルト・ナット | 各2個 |
データファイルは「こちら」 |
データファイルは「こちら」 |
|
各パーツの切削加工やバリ取りなどが終われば、似た部品が多いので間違わないように小分けしておきます。 次に組み立てに必要なスペーサーやクランクのシャフトを加工しますが、使用するアクリル板の厚みにより 寸法が異なるので、組み立て図に記した寸法を目安とし、現物合わせで加工します。 ①φ2真鍮丸棒(図面の赤A印)約30㎝と少し長めにカットしておき、組み上がった段階で余った分をカットします。 φ3アルミパイプ(図面の赤B印)も上記同様です。 ②スペーサの加工 ホームセンターで入手出来る外径5mmのABS丸パイプを所定の長さにカットしますが、印を付けた所に カッターナイフを当て、前後に何回か転がせば簡単に折ることが出来ます。端面をヤスリ等で綺麗に仕上げます。 ③クランクシャフトの加工 φ2mm、φ3㎜真鍮丸棒を必要寸法にカットします。(どちらもペンチで切れますが、少し長めに切断し端面を ヤスリ等で綺麗に仕上げます) |
|
左半分だけの図ですが、左右対称なので右側も同様です。左右が完成したら隣接のクランク角度を120°ずらし シャフトにクランクをロックネジ(イモネジ)を使って固定します。中央のスペースは後に変更が効くように余裕を 持って幅を65mmとしました。この寸法だとタミヤのダブルギヤボックスが置けるので電動リモコン化も可能です。 |
|
その後、帆を付けてテストしましたが、本体と帆の大きさが難しく、帆が小さいと動かず、大きく するとバランスが悪くて転倒するなど、この大きさでは無理だと判りました。 結局、風向きに関係なく進むサボニウス型風車を付けて動かすことにしました。 |
|
タミヤのNo.188 ミニモータ標準ギヤボックス(8速)を中央スペースに設置し、モーターを取り外して サボニウス型風車を取り付けたのが下の画像です。(サボニウス風車はNo.22を参照して下さい) 精度が良い小型のウォームギアを使う方法等もありがすが、設置方法は各自で工夫して下さい。 |