マイコン(Arduino)の勉強を始めて約半年、今回は3つの超音波センサーを使い障害物を避けて走行する ロボットをRCサーボを使い、自動で倒立する複合型のロボットを作りました。ハードウエアについて
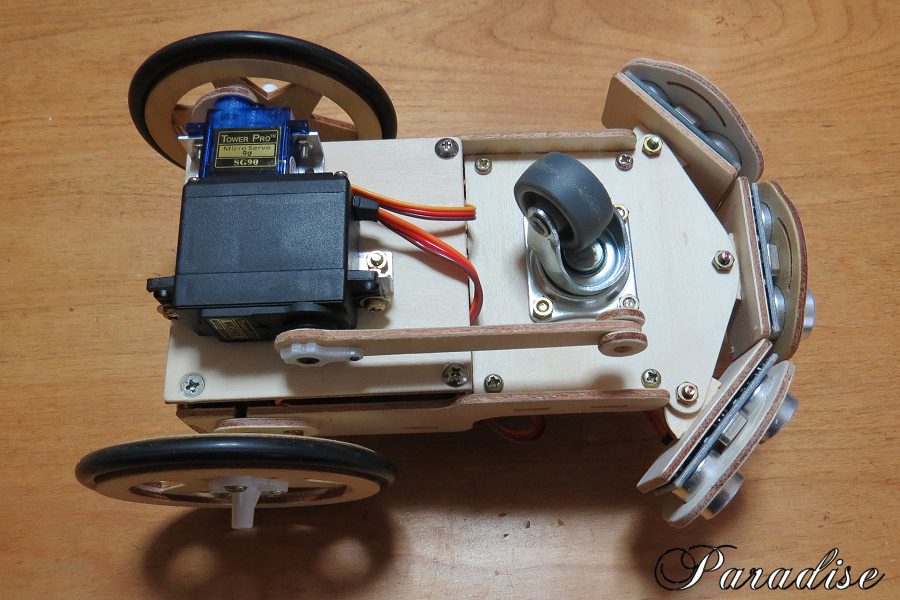
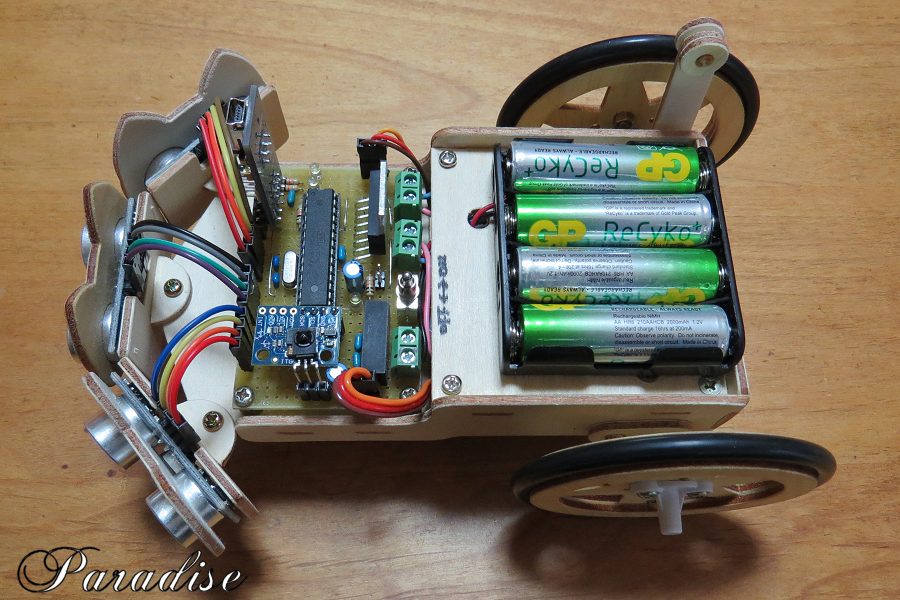
駆動用モーターに今回も「タミヤ」のNo.168 4速ダブルギヤボックスを使いました。しかし、倒立ロボットとして 制御し易い回転数と超音波自律走行に適した回転数に大差があります。結局、中を採って114.7:1を採用しましたが、 超音波自律走行ではスピードが早過ぎて制御が難しく駆動モーターのPWM制御を一杯絞って何とか対応しました。 また、今回もフレームには3㎜厚のシナべニアをCNCで加工し、簡単なほぞ組で強度を確保しました。 超音波センサーはNo.25と26で使った首振り式ではなく、正面と左右斜め45度にセットした3個を使い障害物を 感知するよにしました。私の使った部品リスト
今回の目玉は、超音波自律ロボットを赤外線リモコンを使い、ボタン操作一つで倒立するようにしました。 倒立開始時は先に転倒防止用補助アームを所定位置へ作動、次にメインアームを作動、バランスポイントまで車体を 持ち上げて倒立、数秒の安定時間をおいてスタートさせます。 倒立終了時も補助アームを先に動かして後への転倒を防ぎ、次にメインアーム伸ばした後ゆっくりと車体を下げます。 両アーム共に其々のRCサーボモーターよって働き、正確にバランスポイントに止まるように設定してます。
| 購入部品 | |
| AVRマイコン ATmega328P | 秋月電子250円 |
| 16MHz水晶発振子1個 | 秋月電子30円 |
| DC-DCコンバータMINIMAX MAU102 | 秋月電子500円 |
| ジャイロモジュール MPU6050 | アマゾン430円 |
| フルブリッジドライバ L298N | 秋月電子:350円 |
| メインアーム用RCサーボモーターMG995 | アマゾン:1180円 |
| 補助アー用ムRCサーボモーターSG90 | 秋月電子:400円 |
| 超音波センサーHC-SR04 3個 | アマゾン:5個990円 |
| シャープ赤外線受信モジュール GP1UXC4 | 秋月電子:50円 |
| 木製車輪のタイヤ用Oリング2個 | ヨドバシカメラ:696円 |
| 前輪自在キャスター1個 | HSコーナン:98円 |
| 手持ち部品 | |
| 楽しい工作シリーズ No.168 ダブルギヤボックス 左右独立4速タイプ (70168) | アマゾン:740円 |
| ユニバーサル基板 | 1枚 |
| ニッケル水素電池単3型 | 4個 |
| 単3型電池ボックス4個用 | 1個 |
| ターミナルブロック:2ピン | 3個 |
| タミヤ3㎜6角シャフト(L60㎜拡幅用) | 2本 |
| 基板用トグルスイッチ3P | 1個 |
| 基板用スペーサー | 10mm×4個 |
| シナベニヤ公称3㎜(実際は2.8mm前後) | 300×300(mm)1枚 |
| 表示用3mmLED | 5個 |
| その他CR類及びピンジャックと線材など | 少々 |
|