| 購入部品 | |
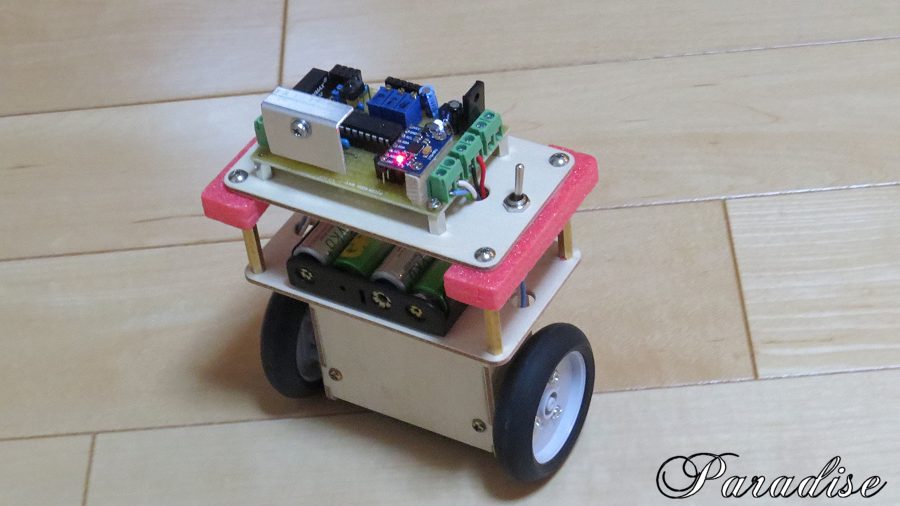
| 楽しい工作シリーズ No.168 ダブルギヤボックス 左右独立4速タイプ (70168) | アマゾン:740円 |
| 楽しい工作シリーズ No.145 ナロータイヤセット58mm径 | アマゾン:373円 |
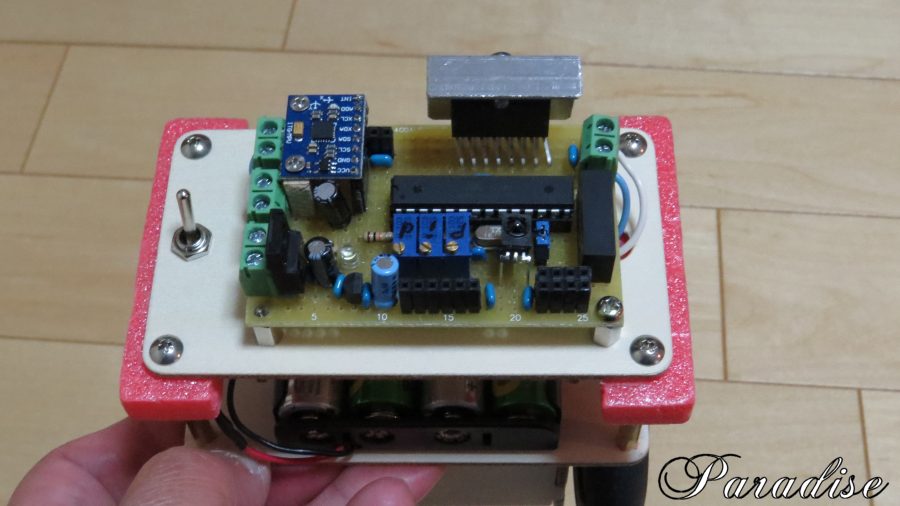
| AVRマイコン ATmega328P | 秋月電子:250円 |
| ジャイロモジュール MPU-6050 | アマゾン:430円 |
| フルブリッジドライバ L298N | 秋月電子:350円 |
| シャープ赤外線受信モジュール GP1UXC4 | 秋月電子:50円 |
| DC-DCコンバーター MINMAX MAU102 | 秋月電子:500円 |
| FT232RL使用USB-SERIAL変換基板 | アマゾン:550円 |
| 手持ち部品 | |
| ニッケル水素充電池単3型 | 4個 |
| ターミナルブロック:2ピン | 3個 |
| 単3電池用ボックス4本用 | 1個 |
| ユニバーサル基板 50mmX72mm | 1枚 |
| トグルスイッチ2P | 1個 |
| 基板用スペーサー | 40mm×4個、10mm×4個 |
| シナベニヤ公称3㎜(実際は2.8mm前後) | 200×150(mm)1枚 |
| 表示用3mmLED | 1個 |
| その他線材 | 少々 |