CNCの自作とCNCで作る工作
Inverted Balancing Robot 3号機を作りました。
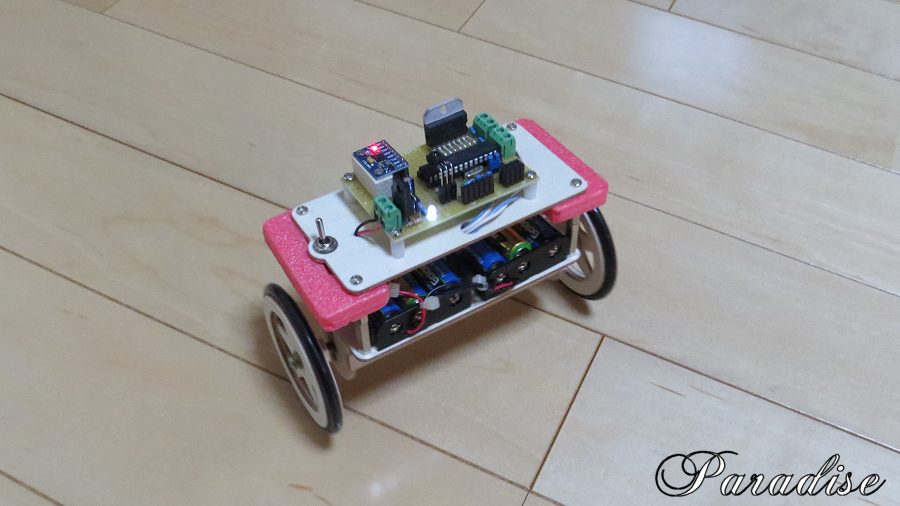
2号機とほぼ同じですが、以前に通販で購入した中国製の12Vギアモーターを使いましたが、
現在は入手が難しいようです。この為、再現性が低いですが参考までに紹介します。
工作について
何時ものように3㎜厚のシナベニヤをCNCで加工してフレームを作り、ホイールも同じく
シナベニヤを貼り合わせて作りました。タイヤにはOリング(外径約70mm)を使ってます。
使った部品のリスト
| 購入部品 |
| AVRマイコン ATmega328P | 秋月電子:250円 |
| ジャイロモジュール MPU-6050 | アマゾン:430円 |
| フルブリッジドライバ L298N | 秋月電子:350円 |
| シャープ赤外線受信モジュール GP1UXC4 | 秋月電子:50円 |
| Oリング1A-P58(2個入り) | ヨドバシカメラ:344円 |
| 手持ち部品 |
| 12Vギアモーター(300rpm) | 2個 |
| 単3型アルカリ乾電池 | 6個 |
| 単3電池用ボックス3本用 | 2個 |
| ターミナルブロック:2ピン | 3個 |
| ユニバーサル基板 50mmX72mm | 1枚 |
| トグルスイッチ2P | 1個 |
| 基板用スペーサー | 40mm×4個、10mm×4個 |
| シナベニヤ公称3㎜(実際は2.8mm前後) | 300×250(mm)1枚 |
| 表示用3mmLED | 1個 |
| その他線材 | 少々 |
基板の回路図
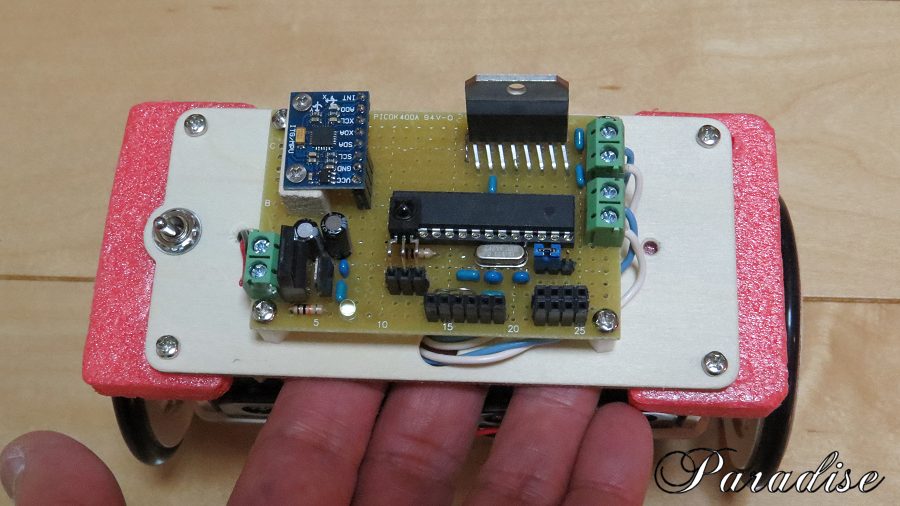
Arduinoを使わずにユニバーサル基板に上記の回路を手配線しました。
USB-Serial変換部は組み込まずに6Pinソケットを介して外付にしてます。
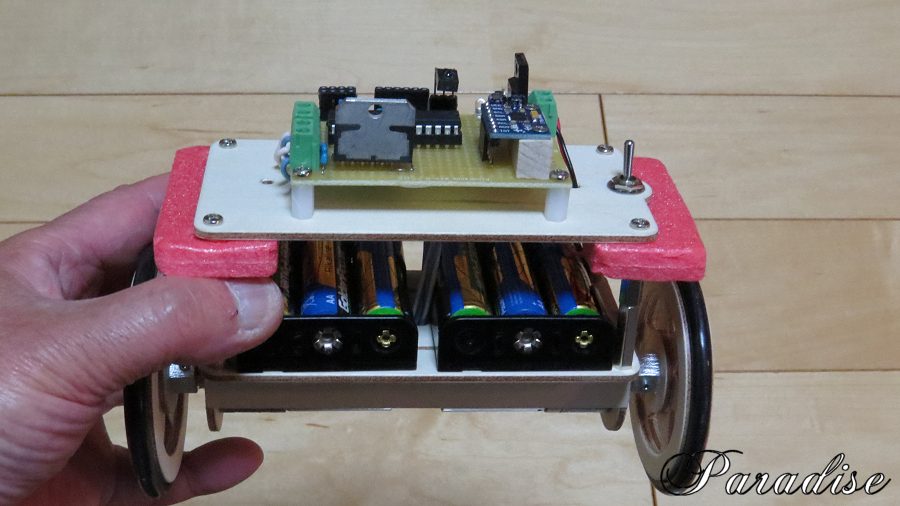
電源はアルカリ乾電池6本の9Vで使ってます。
基板の様子
完成したInverted Balancing Robotを動画でご覧下さい。
皆様の参考になれば幸いです。
by Paradise
MENUへ戻ります。
