|
先に作ったマーブルマシンミニと同様にアクリル板の端材を活用して作りました。 基部の大きさが直径10㎝の円形で高さが23㎝センチです。基部にステッピングモーターと ドライバー回路、電池ボックスを配置しました。 このマーブルマシンの原理は、らせん状に巻いた真鍮線コイルが回転するとガイドレールに沿って ボールが上昇する仕組みを応用したものです。 私はコイルの周りに8本の垂直レール(3㎜径アクリル丸棒)を配置し、コイルが1回転すると最大8個の ボールが上昇する構造としました。多分8レーンの作例が皆無と思います。 |
|
この作品は一つのスパイラルマシンに1対のループと1対のジグザグ走路を組み合わせたシンプルな 構造です。今回もボールには6mm径のベアリング球を使いました。 |
|
画像中央がスパイラルシャフトで、6㎜径真鍮パイプに真鍮線#18をらせん状に巻きつけた物です。 スパイラルシャフトの周りに3㎜径アクリル丸棒を等間隔に8本立てたのが垂直レールです。一番下部に補強を 兼ねたフランジを設け、ここにボウルが通る穴を8か所開けてます。走路から下りてきたボールがフリップフロップ で振り分けられ、この穴から入りスパイラスコイルにすくい上げられレールの間を再び垂直に上昇します。 |

|
垂直レールの上部にはボールの出口があり、隣り合う2か所のの出口を一つにまとめて走路に導きます。 走路は2種類で10回転ループと11段のジグザグスロープをボールが下ります。 |

|
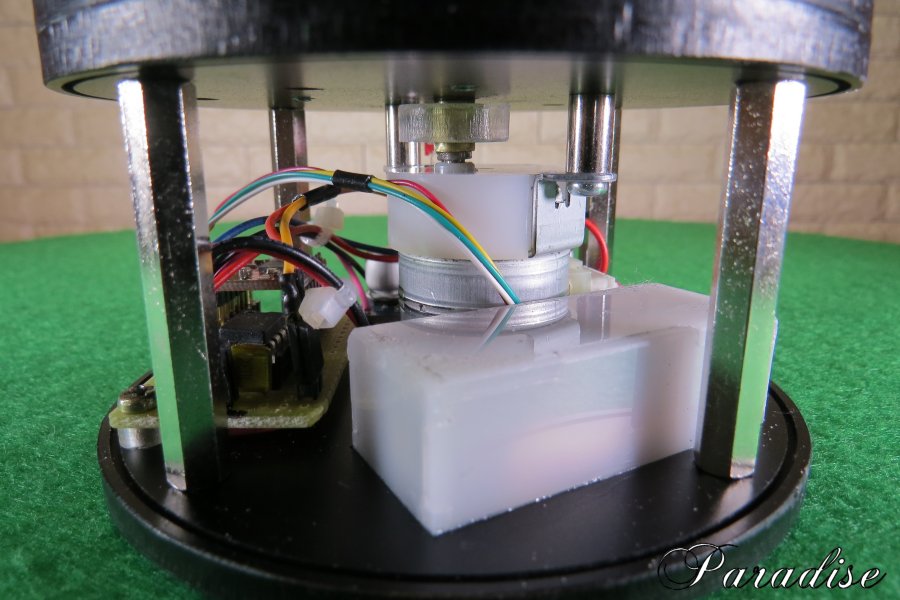
スパイラルシャフトをステッピングモーターで直結駆動してますが、6㎜径真鍮パイプの内径が約5㎜なので 外径5㎜内径3㎜のABSパイプを入れ子にしてモーターの3㎜軸を挿入し、アクリル板を加工したセットカラーで 空転を防いでます。ここに使ったモーターは秋葉原で数年前に購入したコパル電子の1702型1/12減速タイプです。 |
|
基台部にカバーをするので外から電池を取り外しができるように、自作電池ボックスを下向きに取り付けました。 |

|
安価なステッピングモータードライバーA4988にC-MOSタイプのNE555タイマーICで作ったクロックを加えて動かしました。 A4988ドライバーは3V~5Vで動作するので3.7Vリチウムイオン電池を1本使用。ステッピングモータには昇圧型DC-DC コンバーターで12Vに変換して印加しました。この回路の稼働電流は約190mAです。 A4988ドライバーはマイクロステップをフルステップから1/16ステップまで選べますが、ここでは1/16ステップを使いました。 |