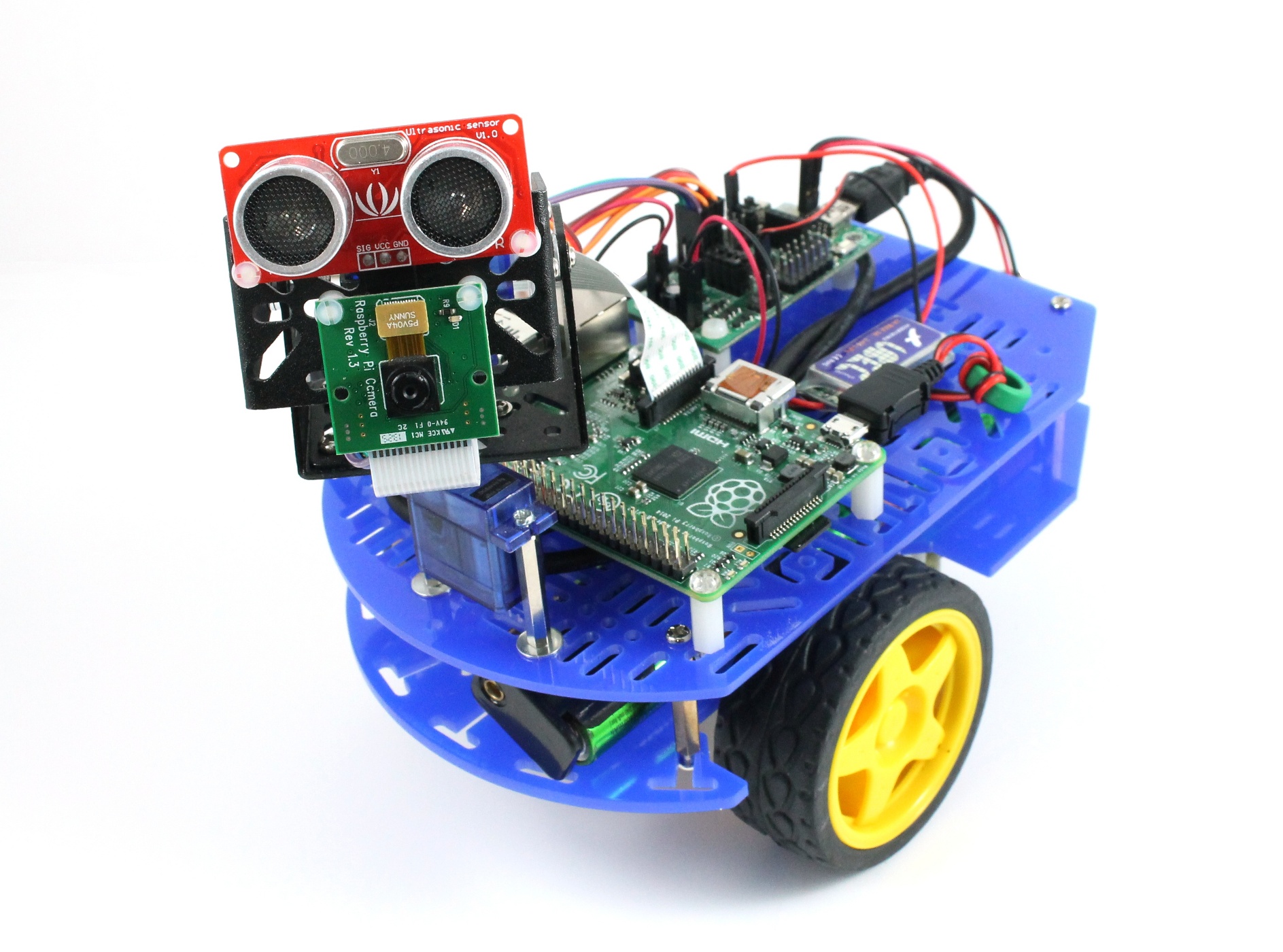
We had a great response to a recent blog post we wrote, describing how to build a Raspberry Pi robot that you can drive around using a tablet, smartphone or PC. Therefore we’ve carried on developing the software for it, and are pleased to announce the update today. The changes that we’ve made to the software have largely been to support cool things that we want to do with the robot in the future, but features that users of the robot will notice are
- much faster camera streaming. Initially the camera was streaming images at about 4-5 frames per second using raspistill and mjpg-streamer, but we’ve now written our own camera streamer, and got it streaming at 15fps which is much smoother, and makes driving the robot around a lot easier.
- support for more WiFi dongles when working as an access point. Our previous software release mainly worked with WiFi dongles that used the same chipset as the Edimax EW-7811Un (the hostapd rtl871xdrv driver). It was possible to get it to work with other WiFi dongles that used the hostapd nl80211 driver, but it required a fairly technical user. Now our software should work with a much wider range of WiFi dongles with no change required.
- we’ve added a shutdown button. Previously the robot was turned off by just cutting off the power. This was very unlikely to corrupt the SD card as nothing was written to it, but a lot of users felt uncomfortable with not doing a proper shutdown. Now a shutdown button in the web interface provides peace of mind.
- more configuration options. The configuration webpage of the robot has been expanded to offer more options to control the movement of the robot.
As before, there are multiple options for getting hold of this software. If you already have an SD card then you can download an SD card image with all of the software installed here (go for the most recent version). Update: If you use our SD card image, please remember to expand it after installation by running
sudo raspi-config
and choose the ‘Expand Filesystem’ option.
Alternatively, we sell SD cards with the image preloaded in our store. Finally, for those who want to set up the software from scratch, or who want to modify it for their own robotic projects, we give full details for building the SD card, and installing all the software, here.
We believe that the Raspberry Pi is a great platform for robotics, and have got a number of tutorials for our Raspberry Pi Camera bot lined up for the coming months. If there’s anything in particular you’d like to see, please let us know.







 Co-op
Co-op