 Radomir Dopieralski
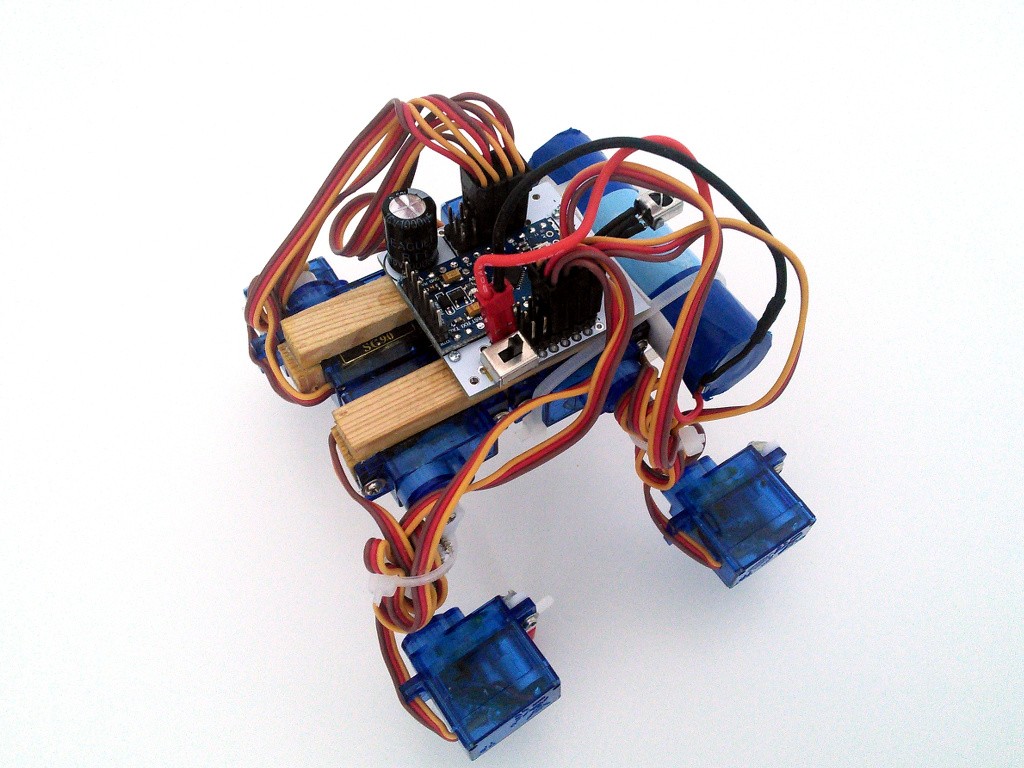
Radomir DopieralskiThis is one of my early experiments at building a cheap quadruped. Since there are a lot of servomechanisms in such a robot, even when they are relatively cheap, they comprise a large part of the total price. So reducing the number of servos is an obvious way of reducing the price.
However, it's almost impossible to have proper inverse kinematics with a robot in a spider/lizard configuration with only two degrees of freedom per leg. Fortunately, in the mammal configuration, when both degrees of freedom move the leg in the same plane, it's possible to have two-dimensional inverse kinematics, and that's what this robot does.
It can move its center of mass, and it can move its legs backwards in a straight line, and then raise them and move them forward. That is enough for implementing a proper statically stable "creep" gait. Unfortunately, it's not enough for implementing proper turning. In order to turn, this robot works like a tank, by making the steps on one side shorter than on the other (or even reversing the direction). This is sub-optimal, as it leads to slippage and unpredictability, but that's the best I could do without adding at least one servo and rebuilding the robot completely.





 jimrd
jimrd Dan Royer
Dan Royer
Are you ever going to actually put it into a stuffed toy? I would really enjoy that!