 The Big One
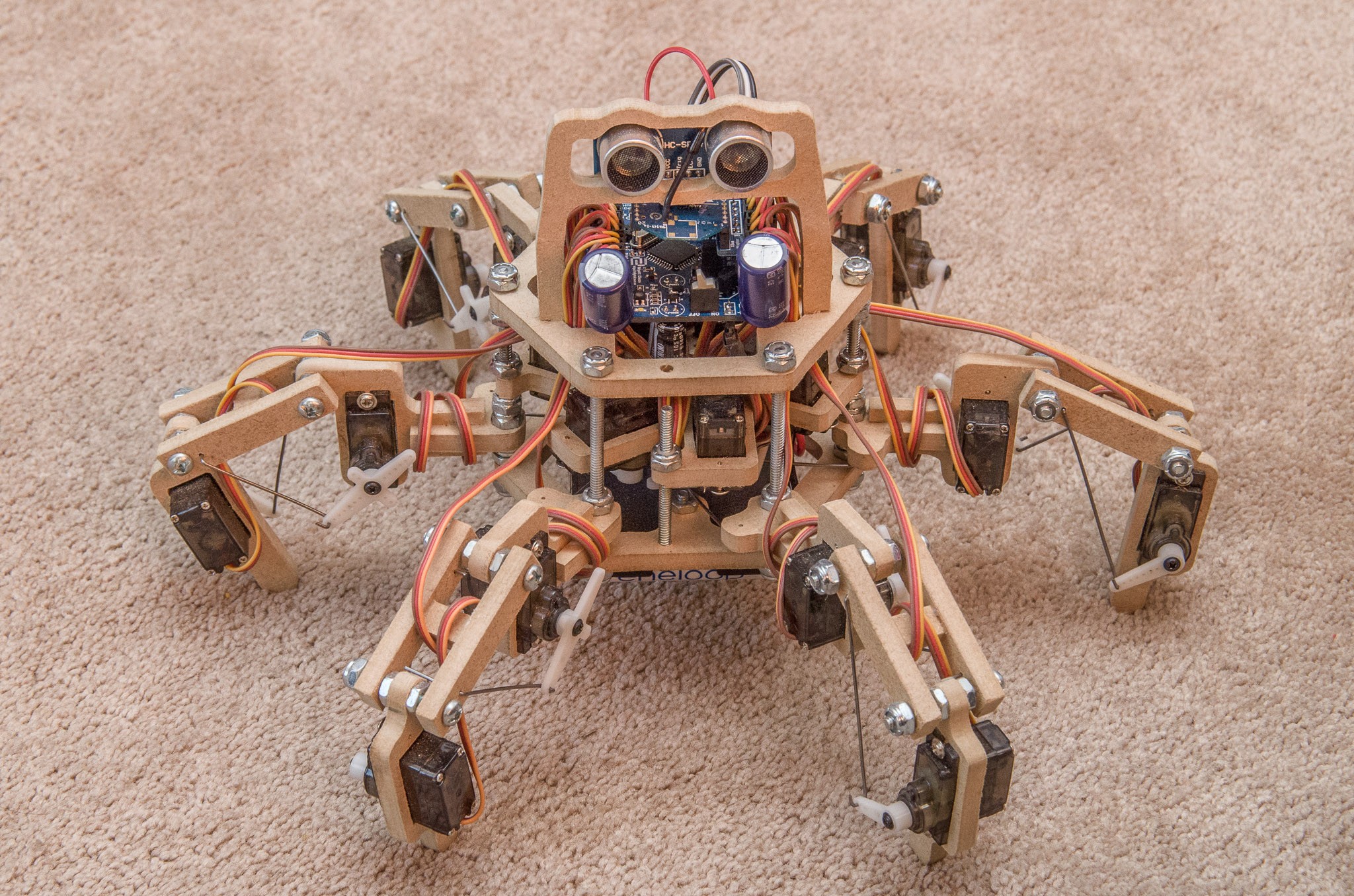
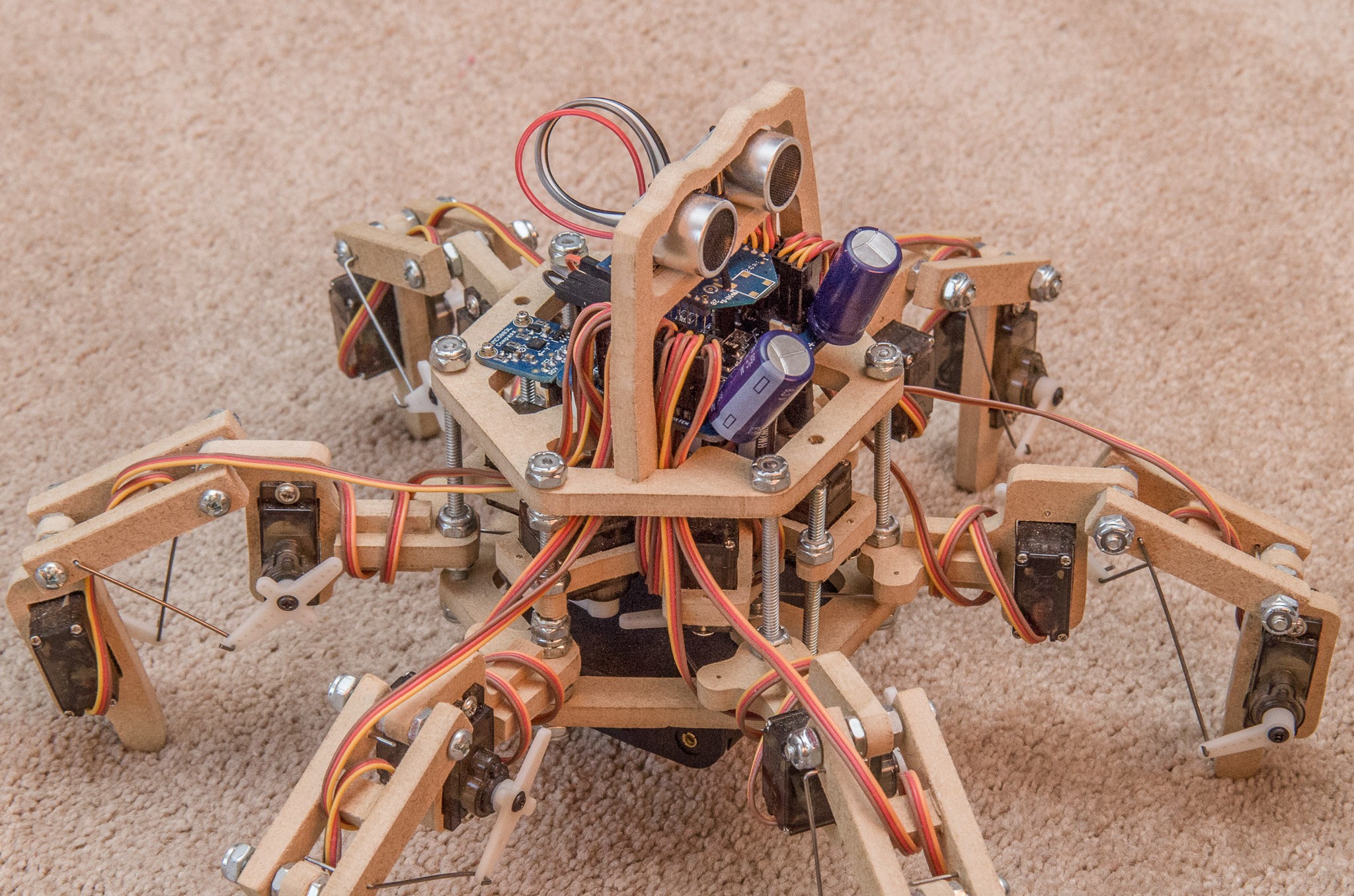
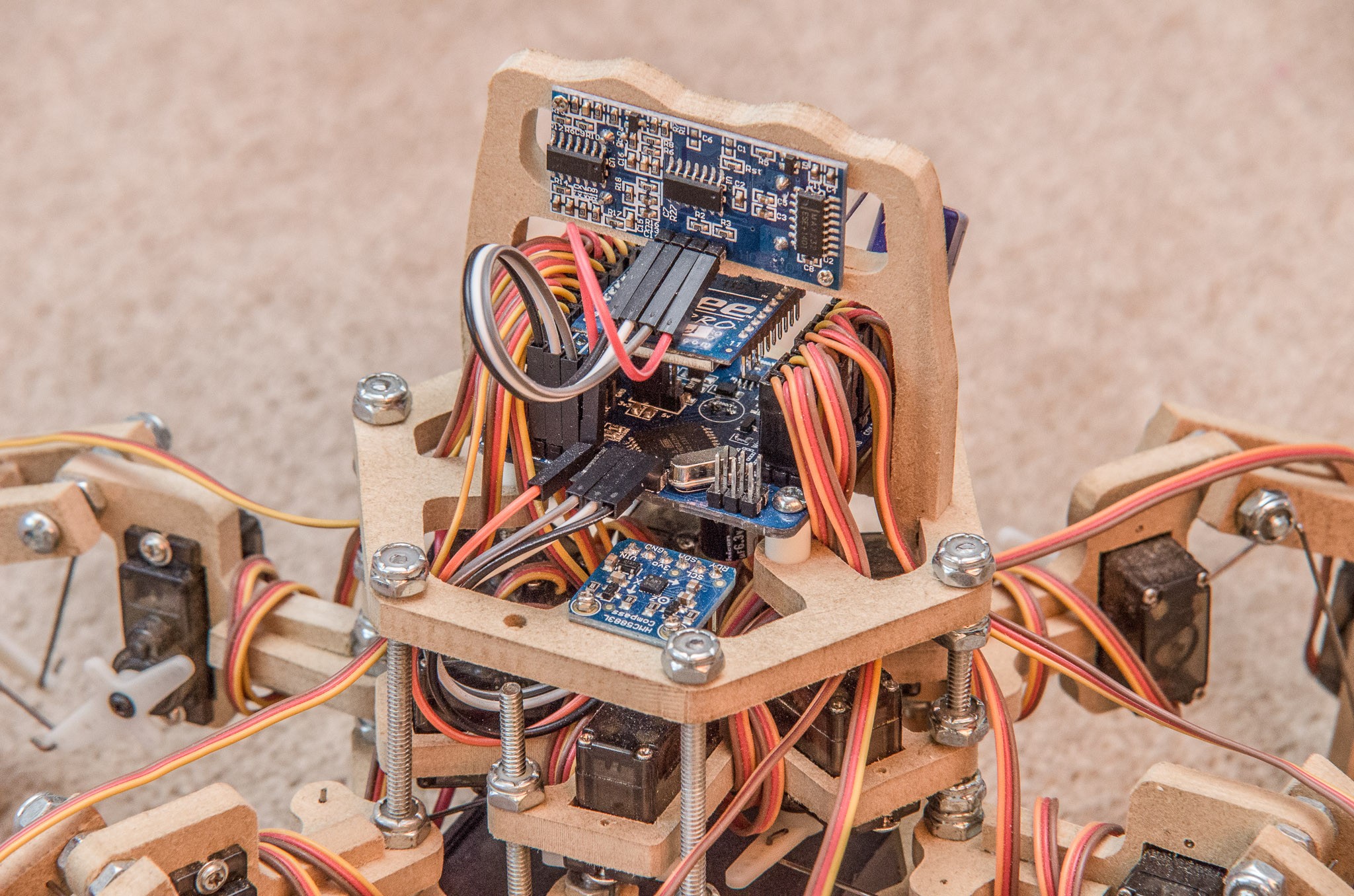
The Big OneAs promised, below are some high(er) resolution photos of the newest frame + distance sensors.
As for the status, I have not done a lot of work on Stubby recently. There is an oustanding bug with the Processor API turn command: when turning to a specified heading, Stubby will overshoot and then bounce back and forth. I may end up converting to an actual PID routine for this... currently I am using a PID-like approximation, but it doesn't give me much control in tuning. I just don't know when I will do the final bits... I am still a bit overdosed from all the time spent in the beginning of October, before the finalists list was announced.
Cheers
Discussions
Become a member
In order to follow projects & hackers or give likes
Already a member?you need to create an account.