

Rambling Update on the MeArm - More to follow!
So v0.4 has been kind of complete for a while, there are a number of tweaks I want to apply but they’ve not yet made it to the plans. Should really just publish and be dammed but I do like to take some good pictures of a new version and I’ve not had the time to do that hence not published.
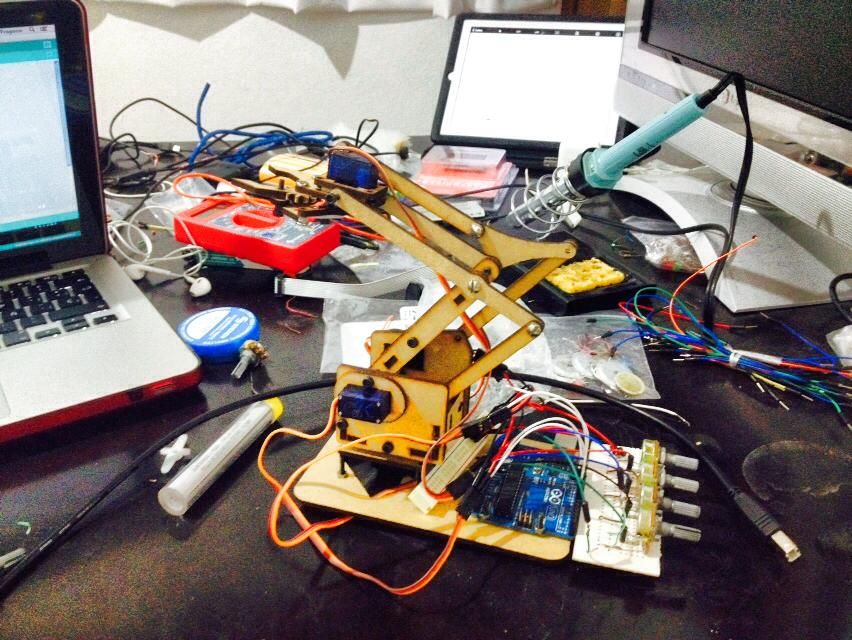
Have had a lot of feedback on v0.3 and have now seen versions built in the UK, Switzerland, the USA and most recently Mexico (image above is the Mexican MeArm)! Not bad from a little robot arm from Nottingham England! Jack’s design for the v0.3 has been a real success. Lots has been done on the code and I’ve now see it run on Arduino and the Raspberry Pi. Some great work has been done by Bob Stone on this front. His github repos are amazing https://github.com/RorschachUK
The meArm was also very fortunate to be invited along to the Science Museum in London for the Make.Hack.Do festival. We build around 10 arms and probably 100 of the grippers over a 5 day period. We (that’s me and the meArm) met a father and son from Switzerland (mentioned above) who had built a meArm from balsa wood on their home made CNC mill. They really made my day. There’s some video of the arm in action here:
Quite a bit more to tell but that will have to do for now!
Read more5 things I've learned from Kickstarter
It’s been a fascinating few weeks after launching Mirobot on Kickstarter. It’s an amazing way of getting a project off the ground and I’ve had a very positive experience so far. I’ve been genuinely touched by the belief and generosity my backers have shown. I thought a post on my learnings might help others on their own kickstarting journey because it’s a very worthwhile experience so long as you do things properly.

-
Network
It’s pretty well known that the success of a Kickstarter project depends largely on the number of eyes you can get on the project page. This is classic SEO conversion optimisation, but what’s not talked about quite as often is how important the relevance of those eyes are. Make sure you target sites that are going to have readers who are more likely to be interested in your product. For me, this meant going after educational and robotics blogs and interacting with the maker community (all of which were natural things to do anyway).
-
Weekends are quiet
At least they were for me. There was much less activity on Twitter and about half the normal amount of backers over the weekend. It’s probably worth timing your campaign to take this into account. Definitely don’t launch at the weekend!
-
Backers not customers
From my experience people want to get involved with projects they believe in. My goal for Mirobot was to get an engaged group of early adopters who will help me build my product into something that can become even bigger. Some product manufacturers seem to treat Kickstarter as the final stage of product development, but it’s a missed opportunity not to involve people in the product design process - user testing is key to a successful product and here are people who are so committed that they will happily wait months for the finished product. It’s worth trying to ship out an early batch to a small number of people who will help you iron out any problems before you hit mass production.
-
Meet real people
Going to Maker Faire UK gave me the opportunity to show Mirobot to thousands of people and, more importantly, to discuss with them about what they find important and interesting about it. It also generated a lot more coverage because people were much more likely to tweet or blog about something they’ve actually seen. Visit local meet ups and user groups. Networking is not all about manning Twitter!
-
Don’t expect to get much development done
Obviously if you have a large team this might be easier to do, but for me it wasn’t. I’d expected to be able to continue development throughout the campaign but in reality, the constant responding to tweets, backer questions and trying to get more coverage keeps you sufficiently distracted to make focussing on anything else impossible. Make sure you take this into account when planning timescales.
There are plenty more minor things, but these are the main points I’ve learned after putting Mirobot on Kickstarter. I’ll keep the blog updated as the project completes and I switch into delivery mode. In the meantime, at the time of posting there are still a couple of days left to back the project!
Read moreMeArm Gets Inverse Kinematics Code!
Gets whatnow? Well Kinematics is the physics or maths of the movement of things. Inverse kinematics is the use of the equations of the movement of things to get the part of a robot to where you want it to go.
Bob Stone and Nick Moriarty of York Hackspace set to first building one of our very first MeArm Robots and then giving it some much needed brains by application of Inverse Kinematics. So that now you can provide a place in space with Cartesian coordinates (x,y,z) and the claw will go there. They’ve shared the code on Github as they are amazing and also a video on the youtube.
Read moreRaspberry Pi, Scratch and Mirobot
One of the things that people asked me during the fantastic Maker Faire UK last weekend was whether Mirobot would work with Scratch and the Raspberry Pi. This is hugely appealing for many reasons, but one that particularly appeals to me is the similarity to the early days of computing in schools. I’ve always said that one of the big influences for Mirobot was the BBC Turtle, which worked with the BBC Micro computer.

Educational robotics, old and new
There’s something really nice about using the modern equivalents to update robotics in schools for the 21st century and using the Raspberry Pi, Mirobot and Scratch makes a poetic kind of sense. Mirobot has been built to be very open so integrations like this are pretty straightforward. Check out the demo video below and then read on for more details on how I did it.
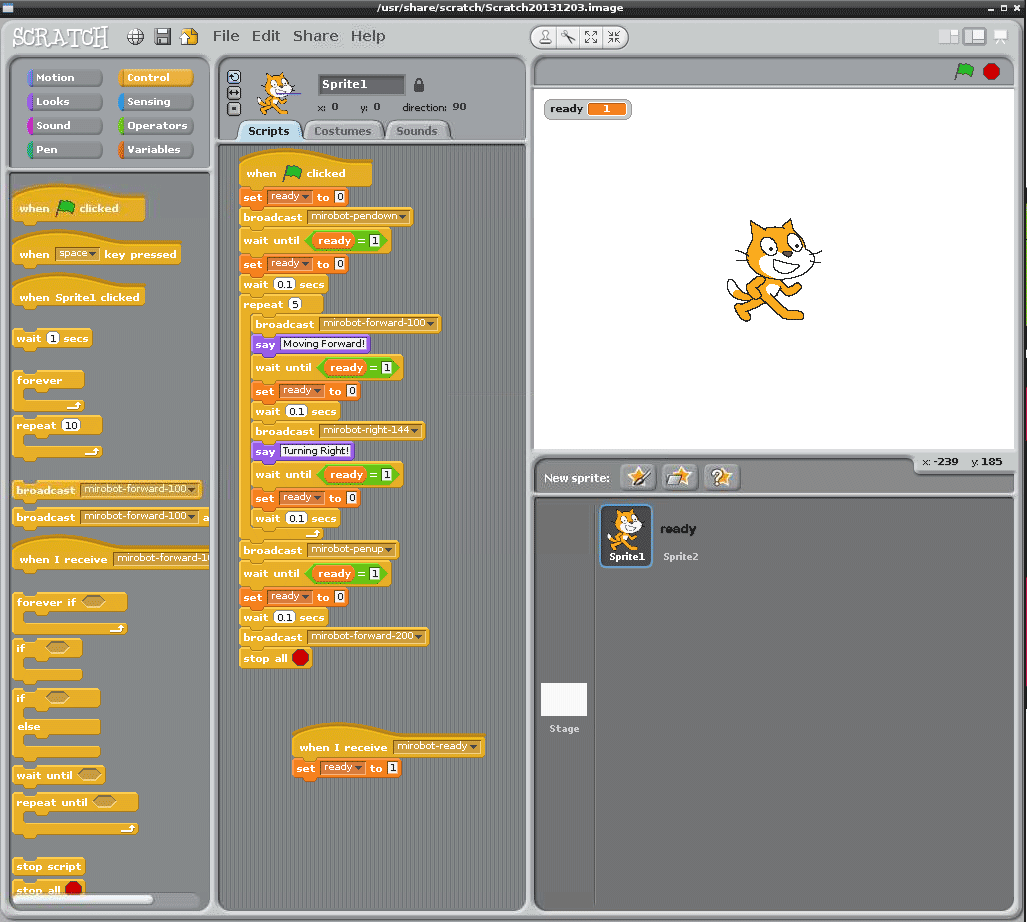
Building integrations like this with Scratch is made relatively tricky because Scratch only has a limited means of interacting with external resources. Fortunately, using the “Remote Sensor Connections” functionality I was able to write a small bridge in Node.js that would send the commands from Scratch to the WebSocket interface of Mirobot and then let Scratch know once the action was complete. You can see the hacked together script in this gist if you’re interested. The way this works is as follows:
- Scratch broadcasts a message, (e.g. mirobot-forward-100) and waits until it has completed
- Node.js receives this message, decodes it (you can’t send arguments) and forwards it on to Mirobot
- Mirobot completes the command and broadcasts the “ready” message
- Scratch receives the “ready” message and continues with the program
I used a trick in Scratch to make it wait until the command had completed before sending the next:

If you’re interested, you can also check out the full Scratch program I ran in the video.
{kind=link}
I’d love to make this a bit slicker, but to do that I’d have to create custom blocks which means forking Scratch. It’s sad that Scratch v2.0 won’t run on the Raspberry Pi because the next version can be extended more easily. I think I’ll write an add-on for Snap! which is a well-supported fork of Scratch that supports add-ons like this. It runs in the browser too, so it might make a great default interface for controlling Mirobot in any case.
Read more