

New Features
I’ve been busy recently implementing a bunch of new features that I’ve had on my list for quite a while. Here’s a quick rundown on some of them:
Python App
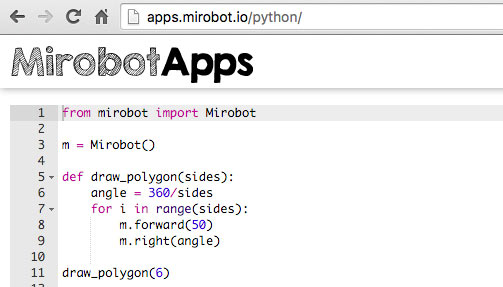
Python is a great programming language for beginners and there’s been a Python library for Mirobot for over a year now, but I’ve always wanted to make it even easier to get started so I put together a way of running Python in-browser so you don’t need to install anything. It’s made with a Python engine called Skulpt.
Auto Discovery
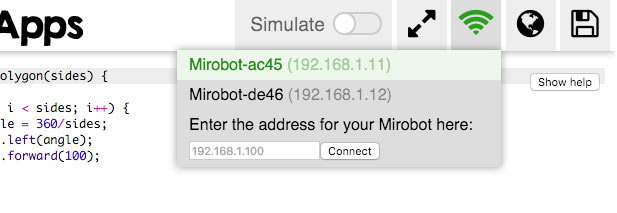
One of the parts of the setup process that always annoyed me was finding your Mirobot on your network once you’ve got it on your WiFi. The latest firmware now has a discovery process built in so that it’s easy to find. What this means is that you can now visit local.mirobot.io when you’re on your own network and it will connect directly to your Mirobot. It also means that if you visit apps.mirobot.io it will autoconnect there too or let you choose which Mirobot you want to use if you’ve got more than one on your network. I’m going to be building support for this into the Python and Javascript libraries to make them even easier to use.
Simulation Tool
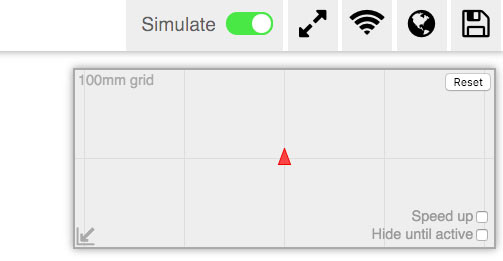
I’d always wanted to have a way of simulating how Mirobot would move that could be used by any app. Now you can just toggle a switch and it will send all commands to the simulator instead of the Mirobot. It comes in especially handy if you want to practice some programming but haven’t got your Mirobot set up and ready.
Fullscreen
When working on programming, it’s nice to be able to remove all distractions so you can now put the apps into fullscreen mode
Chrome App
All of the apps have been packaged up into one Chrome app which lets you run it offline as well as giving you an application icon to click on. It can be installed via Chrome on Mac, Windows and Android devices.
Internationalised Apps
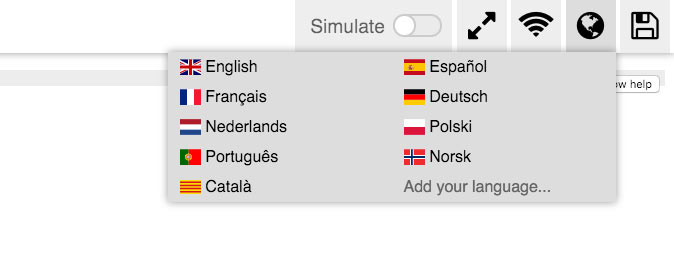
Mirobot is used in over 50 countries around the world so it’s only fitting that the apps should work in more than just English. There are currently 9 languages supported and more on their way. If you’d like to help out by spending 10 minutes translating the apps into your language please get in touch
That’s it for now - if you have any suggestions for features or apps you’d like to see, get in touch
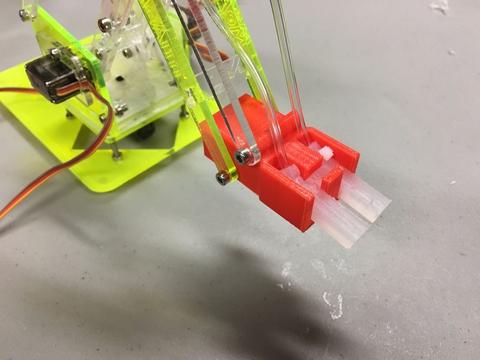
Read moreSoft Gripper for the MeArm - MeArm Mod by XYZAidan
It’s exciting to see what can be done when you start to hack and modify the MeArm. One amazing customer / hacker has made a high tech soft gripper for the MeArm, using some 3D printed parts and some tubing. Check out the video here
In addition to the video XYZAidan has made an instructable and has entered into the Full Spectrum Laser contest. It would be fantastic for such a creative maker to have access to his own laser cutter, so please visit his page and give him your vote!
MeArm on the Raspberry Pi
Running a MeArm on a Raspberry Pi is initially very simple. We hope to make it simpler still with some good example code. Right now it’s very easy to get up and running with just a few jumper cables and an external power supply (like our 6V 2A power supply).
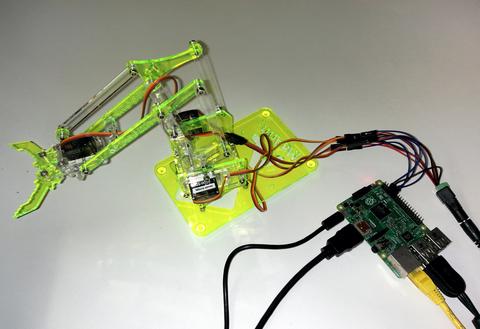
We’re assuming you have a Raspberry Pi up and running and all of the goodies that you need to achieve that. With that running you’re going to want to attach the Pi to the servos as shown below. We’re using GPIOs 4, 17, 18 and 27. These will become servos 0,1,2 and 3 respectively. We recommend you do this whole process before building your MeArm to save you time in calibration and also to save you burning out your servos by sending them somewhere they can’t go! (file available here)
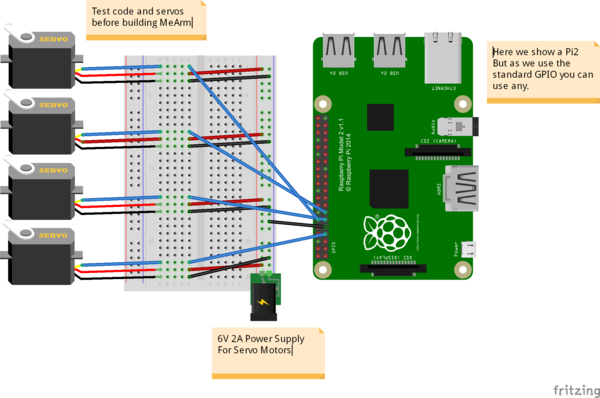
The breadboard used in the image is just to make things look tidy. In reality you can just attach all the grounds and all the power lines and wire them directly to the power, then bring the PWM lines (the servo control wires that come from the GPIO) directly into the servos. Don’t connect the 6V power to the GPIO (other than connecting the ground wire). Also it’s not advised to draw the power for the servos through the GPIO, they can draw up to an amp each and the Pi isn’t set up for that. Better safe than have to buy a new Pi!
Now we’ll need to get to the command line on your Pi. Either boot to it or use a terminal in your GUI. We used a fresh install of Raspian.
[email protected] ~ $ git clone git://github.com/richardghirst/PiBits.git
Cloning into ‘PiBits’…
remote: Reusing existing pack: 359, done.
remote: Total 359 (delta 0), reused 0 (delta 0)
Receiving objects: 100% (359/359), 362.62 KiB | 311.00 KiB/s, done.
Resolving deltas: 100% (154/154), done.
Checking connectivity… done.
[email protected] ~ $ cd PiBits/ServoBlaster/user
[email protected] ~/PiBits/ServoBlaster/user $ make servod
gcc -Wall -g -O2 -o servod servod.c -lm
[email protected] ~/PiBits/ServoBlaster/user $ sudo ./servod –idle-timeout=2000
Board revision: 2
Using hardware: PWM
Using DMA channel: 14
Idle timeout: 2000
Number of servos: 8
Servo cycle time: 20000us
Pulse increment step size: 10us
Minimum width value: 50 (500us)
Maximum width value: 250 (2500us)
Output levels: Normal
Using P1 pins: 7,11,12,13,15,16,18,22
Using P5 pins:
Servo mapping:
0 on P1-7 GPIO-4
1 on P1-11 GPIO-17
2 on P1-12 GPIO-18
3 on P1-13 GPIO-27
4 on P1-15 GPIO-22
5 on P1-16 GPIO-23
6 on P1-18 GPIO-24
7 on P1-22 GPIO-25
Now if everything is working ok, you’ll be able to send the command
| [email protected] ~/PiBits/ServoBlaster/user $ echo 0=50% > /dev/servoblaster |
This will send servo 0 (the one attached to GPIO 4) to 50% of its range. Changing to echo 1=20% > /dev/servoblaster will send servo 1 to 20% of its 0 –>180 degree range.
Next up we use Python and something called TKinter (which should be installed on your Pi already). Create a new file using your favourite file editor (it should be GVIM - it will make you more popular, stronger and better looking). I called it MeArm.py. Add the following code to it and save.
| #!/usr/bin/env python
from Tkinter import * #allows us to make a GUI with TKinter
import os
root = Tk()
First Set Up the Servos
Going to use lists for this
SNums = [0,1,2,3] #Numbers of the Servos we’ll be using in ServoBlaster
SName = [“Waist”,”Left”,”Right”,”Claw”] #Names of Servos
AInis = [90,152,90,60] #Initial angle for Servos 0-3
AMins = [0,60,40,60] #Minimum angles for Servos 0-3
AMaxs = [180,165,180,180] #Maximum angles for Servos 0-3
ACurs = AInis #Current angles being set as the intial angles
Step = 5
for i in range(4):
print(SNums[i],AInis[i],AMins[i],AMaxs[i],ACurs[i])
os.system(‘sudo /home/pi/PiBits/ServoBlaster/user/servod –idle-timeout=2000’) #This line is sent to command line to start the servo controller
#inc listens for all key presses. On certain presses in the if statements below it either calls a process to add or subtract from the current servo angle.
def inc(event):
print “pressed”, repr(event.char)
if repr(event.char) == “‘a’”:
AAdd(0)
if repr(event.char) == “‘d’”:
ASub(0)
if repr(event.char) == “‘w’”:
AAdd(1)
if repr(event.char) == “‘s’”:
ASub(1)
if repr(event.char) == “‘j’”:
AAdd(2)
if repr(event.char) == “‘l’”:
ASub(2)
if repr(event.char) == “‘i’”:
AAdd(3)
if repr(event.char) == “‘k’”:
ASub(3)
def callback(event):
frame.focus_set()
def AAdd(Servo):
if ACurs[Servo] < AMaxs[Servo]:
ACurs[Servo] = ACurs[Servo]+Step
# micro = (1000 + (ACurs[Servo] * 5.555))
micro = (1000 + (ACurs[Servo] * 8.3333))
print(ACurs[Servo],micro)
os.system(“echo %d=%dus > /dev/servoblaster” % (SNums[Servo],micro))
else:
print “Max Angle Reached”,SName[Servo],”Servo”
def ASub(Servo):
if ACurs[Servo] > AMins[Servo]:
ACurs[Servo] = ACurs[Servo]-Step
# micro = (1000 + (ACurs[Servo] * 5.555))
micro = (1000 + (ACurs[Servo] * 8.3333))
print(ACurs[Servo],micro)
os.system(“echo %d=%dus > /dev/servoblaster” % (SNums[Servo],micro))
else:
print “Min Angle Reached”,SName[Servo],”Servo”
frame = Frame(root, width=500, height=300)
boxtext = Label(root, text=”Click this box for keyboard command of the MeArm. Use the a d s w j l i and k keys for control.”)
boxtext.pack()
frame.bind(“<Key>“,inc)
frame.bind(“<Button-1>”, callback)
frame.pack()
| root.mainloop() |
Using a terminal or the command line type
| [email protected] ~ $ python MeArm.py |
All being well you should now have a pop up box that tells you to click inside it to control your MeArm!
Here’s a rough and ready video of the results!
This tutorial is thanks to Carl Monk, who did this nearly a year ago and has gone further than I have here. His excellent work can be found here.
We both rely on the ServoBlaster softwareby Richard Hirst and this great post by Cihat Keser on getting it running quickly.
Read moreAn Addition to the MeArm Workshop - Reflow Oven
In the past week an addition has been made to the equipment we use here at MeArm. Say hello to Gregg, our own specially hacked Argos value-range toaster oven.

With the aid of an Arduino Uno, Gregg’s role has changed from being just a simple toaster oven to being our handy little re-flow oven for our MeArm Brains Boards. With some tweaks and some really burnt PCB’s the Arduino has been programmed to set a target temperature for Gregg to heat up to. The temperature is then regulated by current temperature readings taken from the thermocouple so that our PCB’s are baked to perfection! We found that the most important factor to getting perfectly baked PCBs was in making sure that the thermocouple is in contact with the PCB.
If you’re after a reflow oven and don’t have bundles of cash this should be something to consider if you don’t mind doing some tinkering. Its was fairly easy to build, according to Ben, so if you need a re-flow oven at a low low price, why not have a go at building one yourself? Ben documented some of the build here and I’m sure he could be persuaded to go over the finer points if you ask nicely!
With a little bit of time and effort, you too could be making hand baked artisanal PCBs!
Read more