
OSH Park
Profile for peabody124
Shared projects
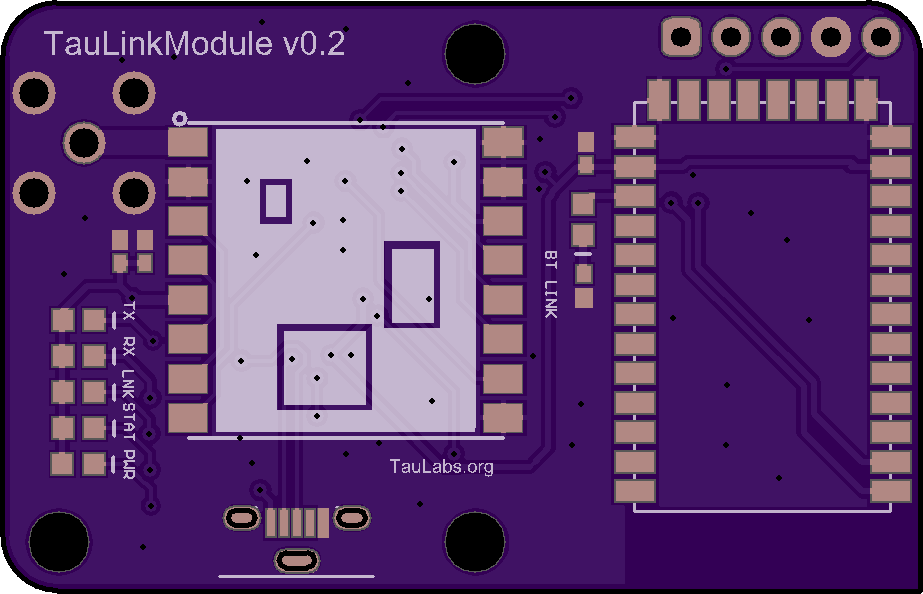
TauLinkModule v0.2
by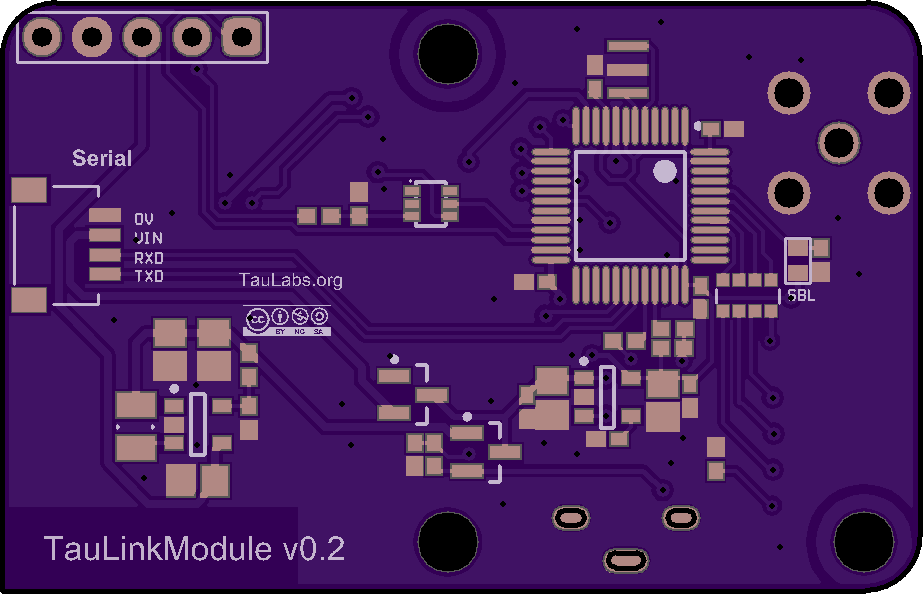
2
layer board of
1.85x1.19
inches
(46.91x30.15
mm).
Shared on
August 14th, 2015 16:14.
Tau Labs JR module compatible TauLink with integrated HM-10 bluetooth relay for telemetry to androidgcs. SmartPort for taranis telemetry. RFM22b for radio link.
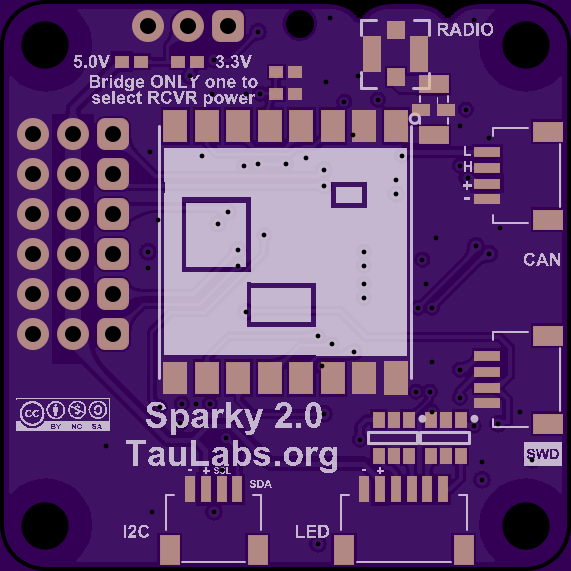
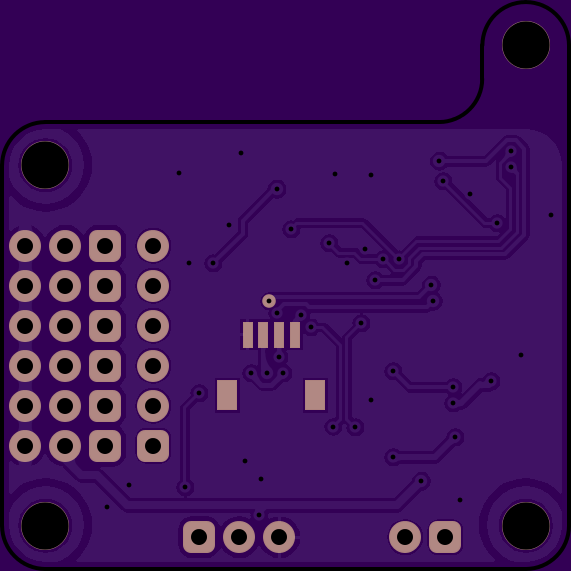
Tau Labs Sparky 2.0
by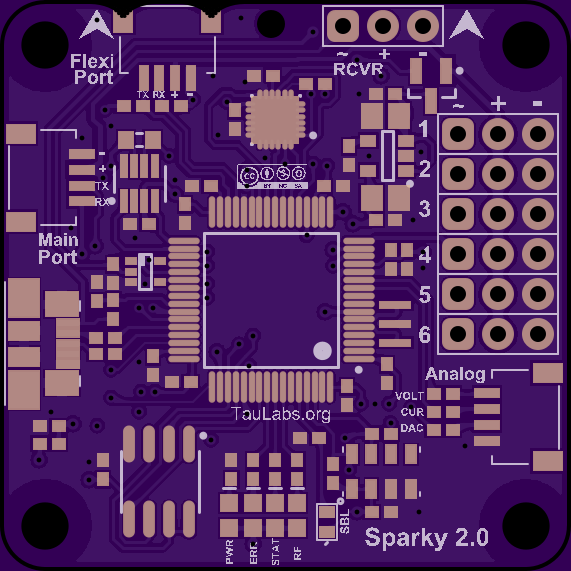
4
layer board of
1.43x1.43
inches
(36.27x36.27
mm).
Shared on
May 12th, 2015 20:28.
This is the Sparky 2.0 flight controller for Tau Labs. It features an F4 processor, MPU9250 mag/gyro/accel, MS5611 barometer, CAN transceiver, RFM22b radio module and more.
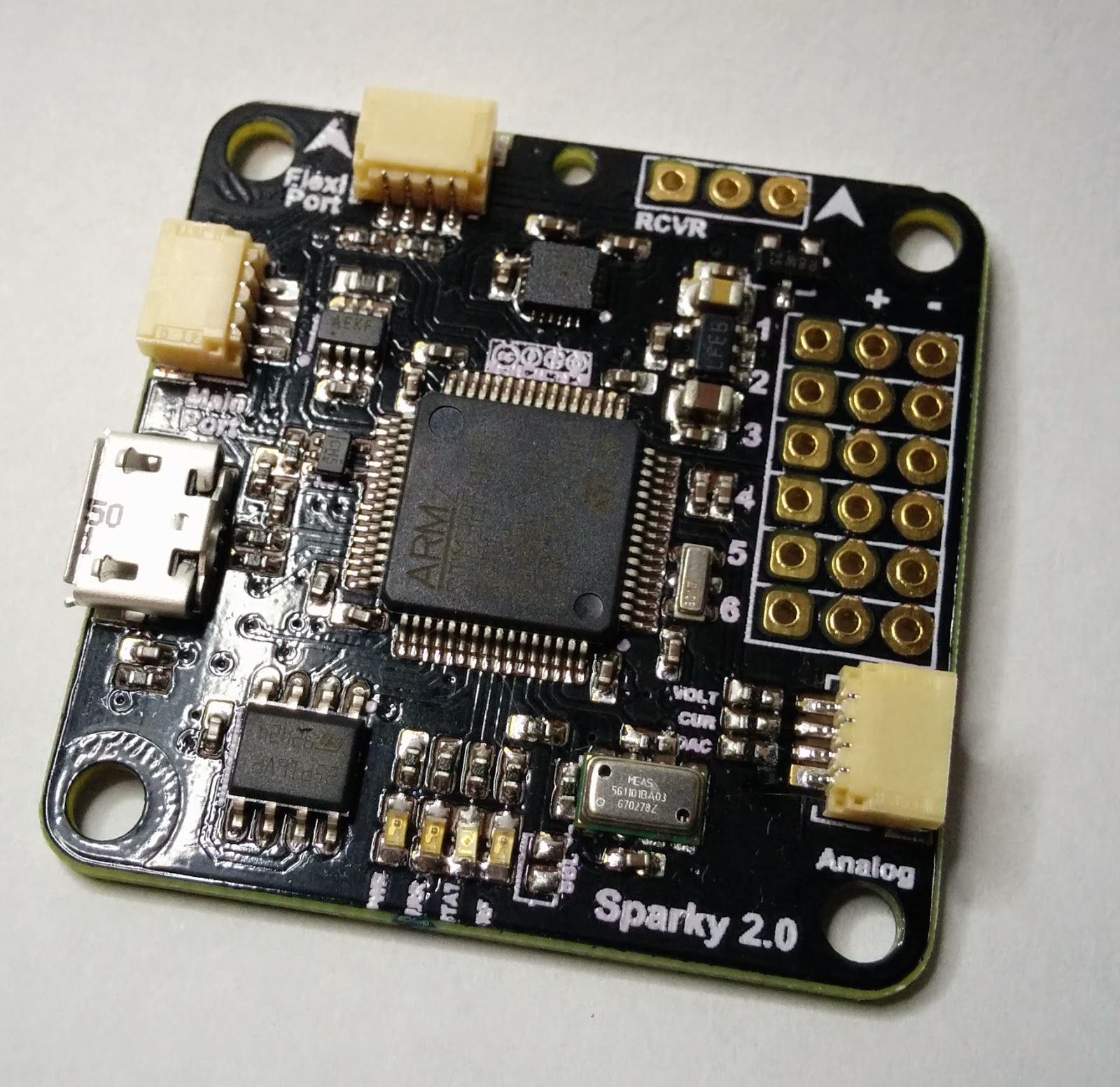
Find more information at the Tau Labs wik or my blog. Also available for purchase preassembled here
Sparky 1.1
by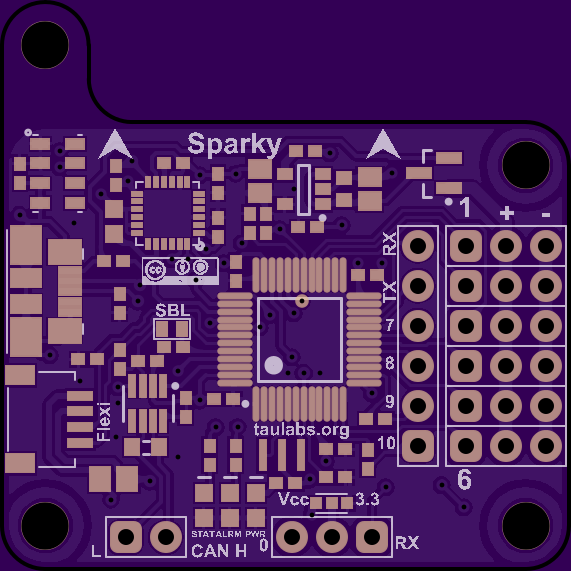
2
layer board of
1.43x1.43
inches
(36.27x36.27
mm).
Shared on
May 6th, 2015 17:57.
Sparky 1.1 flight controller. This is a Tau Labs target that uses an STM32F3 processor and MPU9150 sensor plus an MS5611 pressure sensor. It is capable of altitude hold, position hold, RTH, gimbal control, and more.
Find more information on the Tau Labs wiki. Find assembly information and BOM on github
Brushed Adapter v0.1
by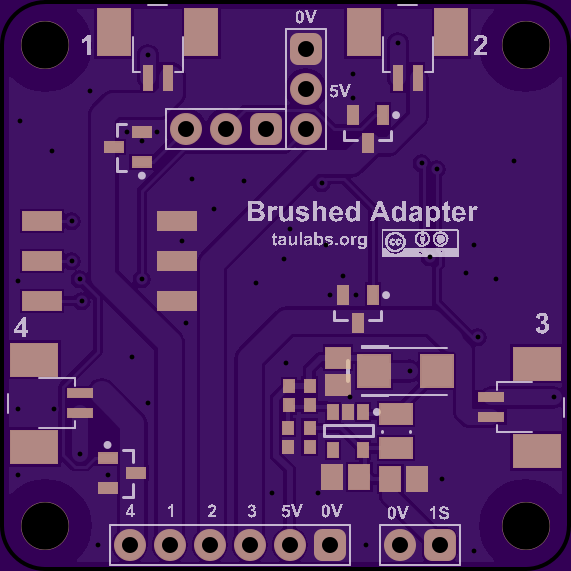
2
layer board of
1.43x1.43
inches
(36.27x36.27
mm).
Shared on
May 3rd, 2015 15:39.
A brushed adapter for Sparky or Sparky2 with an integrated 5V adapter and 200mW 5G8 VTX. Unfortunately it uses the TX5200M module which is hard to come by.
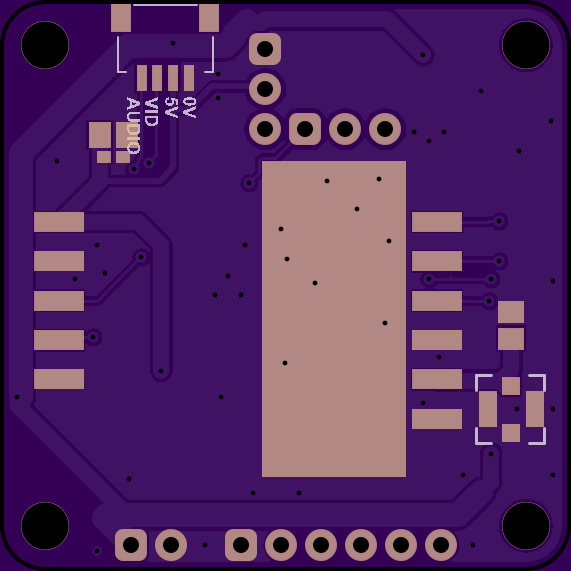
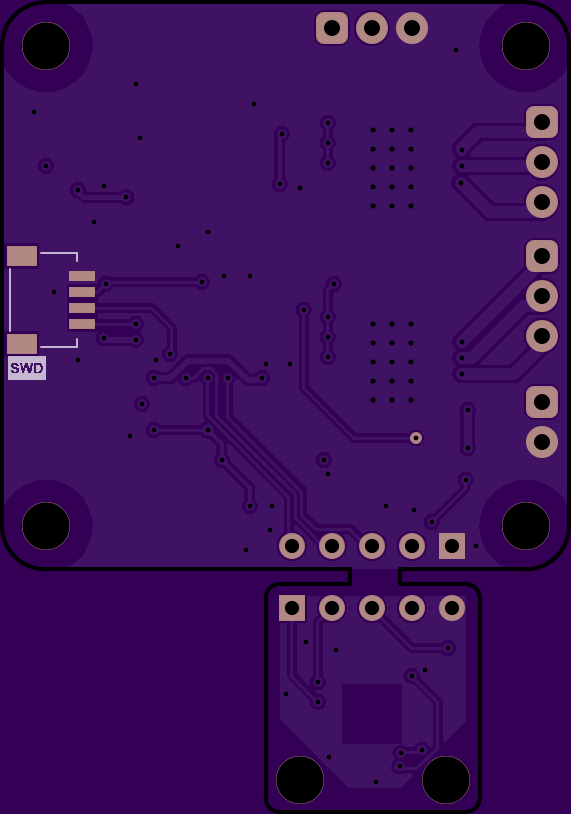
SparkyBGC v0.5
by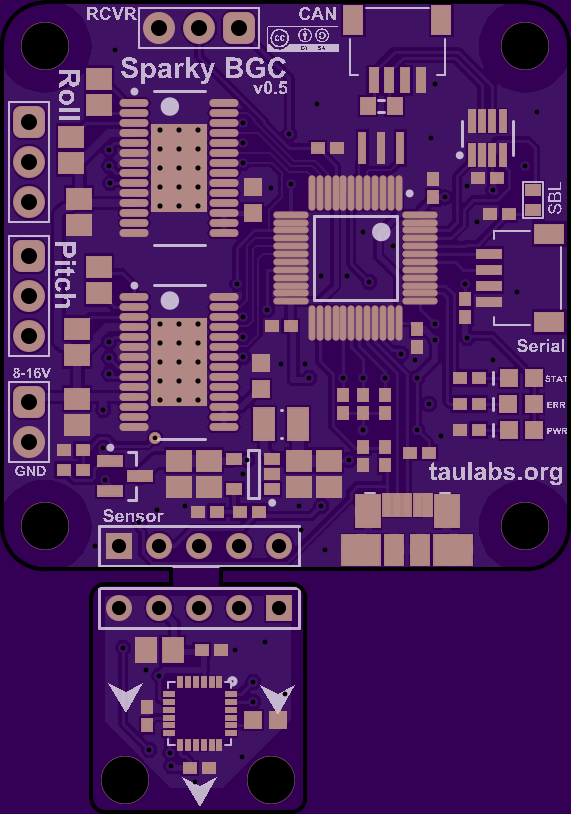
2
layer board of
1.43x2.04
inches
(36.27x51.69
mm).
Shared on
April 13th, 2015 19:49.
This is a two axis brushless gimbal controller board based on Sparky. It uses an F3 processor and can be controlled via a CAN bus from the main flight controller, or used as a standalone gimbal controller. It uses a switching supply to run efficiently and directly from the battery.
Design files can be found on github