 Login with google-oauth2
Login with google-oauth2
 Login with facebook
Login with facebook
 Help
Help
Rapiroの姿勢調整用参考画像
組み立てマニュアルの207番でラピロのサーボモータの角度を調整して、きちんと直立姿勢をとるようにします。その際どのサーボモーターの値を変えればいいのか、増やせばいいのか減らせばいいのか、実際に試してみないわかりにくいと思うので、まとめてみました。
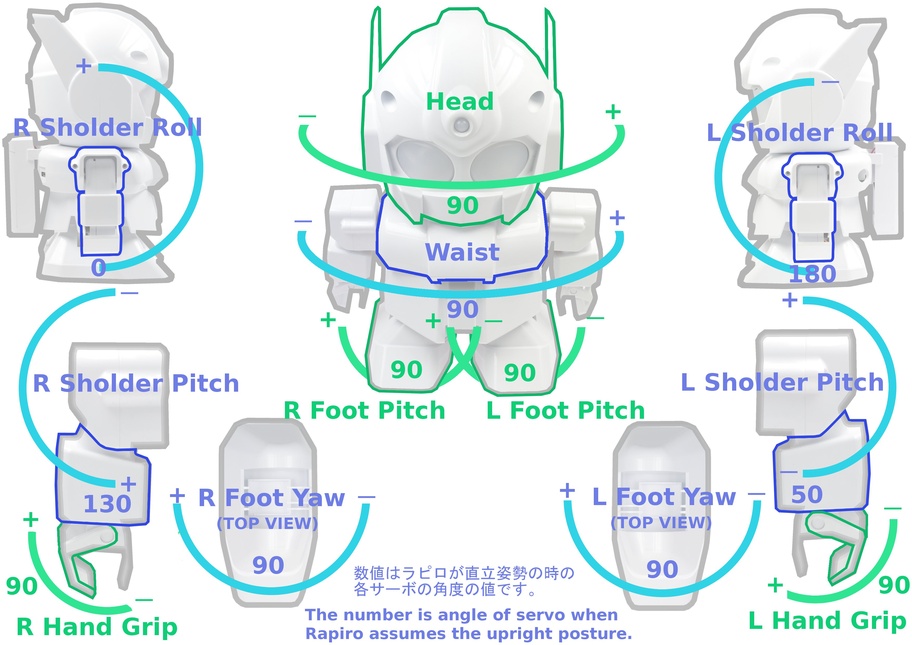
rapiro_trim.jpg
もう一つ例として、ラピロの右腕を外側に調整したいのであればint trim[]MAXSN]配列のR Sholder Pitchの値を-にします。 int trim[MAXSN] = { +5, Head yaw 0, Waist yaw 0, R Sholder roll -10, R Sholder pitch 0, R Hand grip 0, L Sholder roll 0, L Sholder pitch 0, L Hand grip 0, R Foot yaw 0, R Foot pitch 0, L Foot yaw 0}; L Foot pitch