 Login with google-oauth2
Login with google-oauth2
 Login with facebook
Login with facebook
 Help
Help
Rapiroの姿勢調整用参考画像
組み立てマニュアルの207番でラピロのサーボモータの角度を調整して、きちんと直立姿勢をとるようにします。その際どのサーボモーターの値を変えればいいのか、増やせばいいのか減らせばいいのか、実際に試してみないとわかりにくいと思うので、まとめてみました。
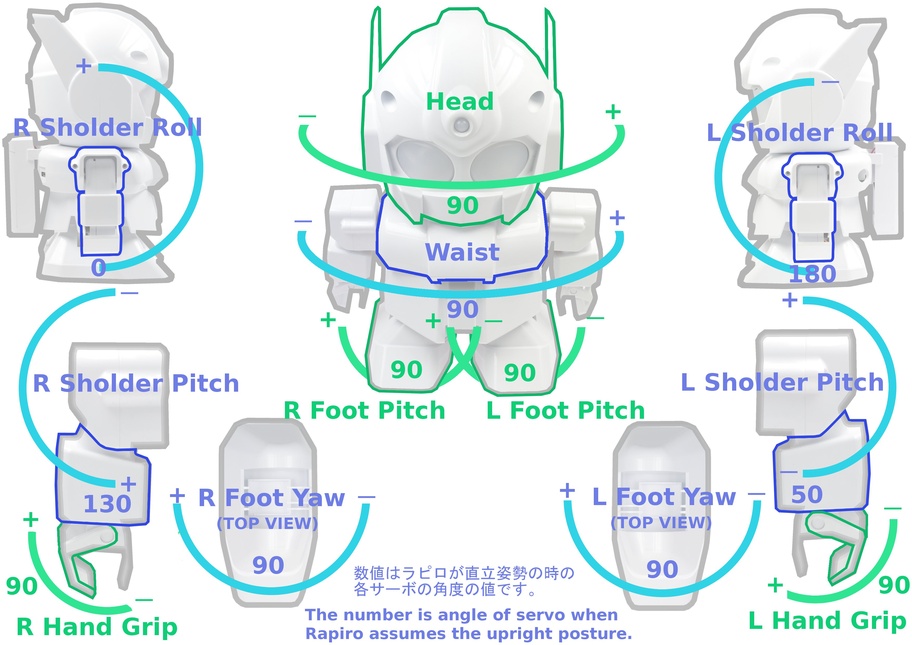
rapiro_trim.jpg
例えば組み立て直後の電源投入時にラピロの頭部が正面ではなく右(ラピロから見て)を向いていた場合、
本当ならば90度で正面を向いて欲しいのですが、右(マイナス方向)を向いてしまっているので+の値をセットして調整します。
具体的にはint trim[MAXSN]の配列のHeadの部分にプラスの値をセットします。どのくらいの値を入力するかは見た目の角度から判断するしかありません。
もう一つ例として、ラピロの右腕を外側に調整したいのであればint trim[]MAXSN]配列のR Sholder Pitchの値を-にします。
int trim[MAXSN] = {
+5, Head yaw
0, Waist yaw
0, R Sholder roll
-10, R Sholder pitch
0, R Hand grip
0, L Sholder roll
0, L Sholder pitch
0, L Hand grip
0, R Foot yaw
0, R Foot pitch
0, L Foot yaw
0}; L Foot pitch