机械臂坐标说明
机械臂默认使用的是基于机械坐标原点(位于底座和大臂连接处)的直角坐标系(也叫机床坐标系)。坐标系说明如下图:
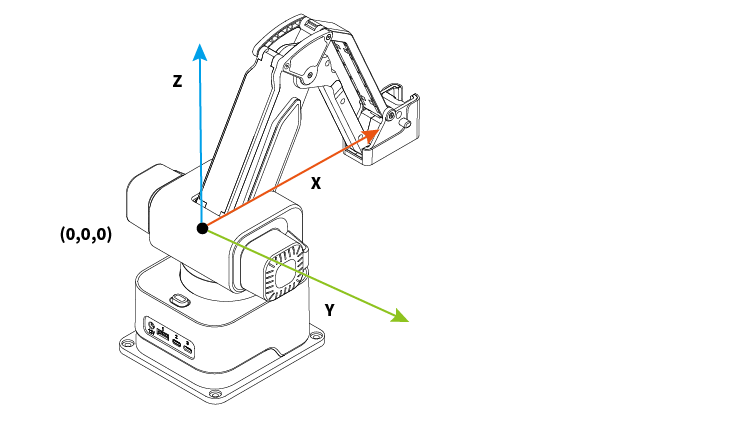
💡Tips: 机械臂获得较大工作面积的点在X300,Y0,Z0的位置,即Rotrics Studio和触控屏上的HOME点。对于3D打印来说,X300,Y0在打印平面上的投影是最合适的打印开始点。
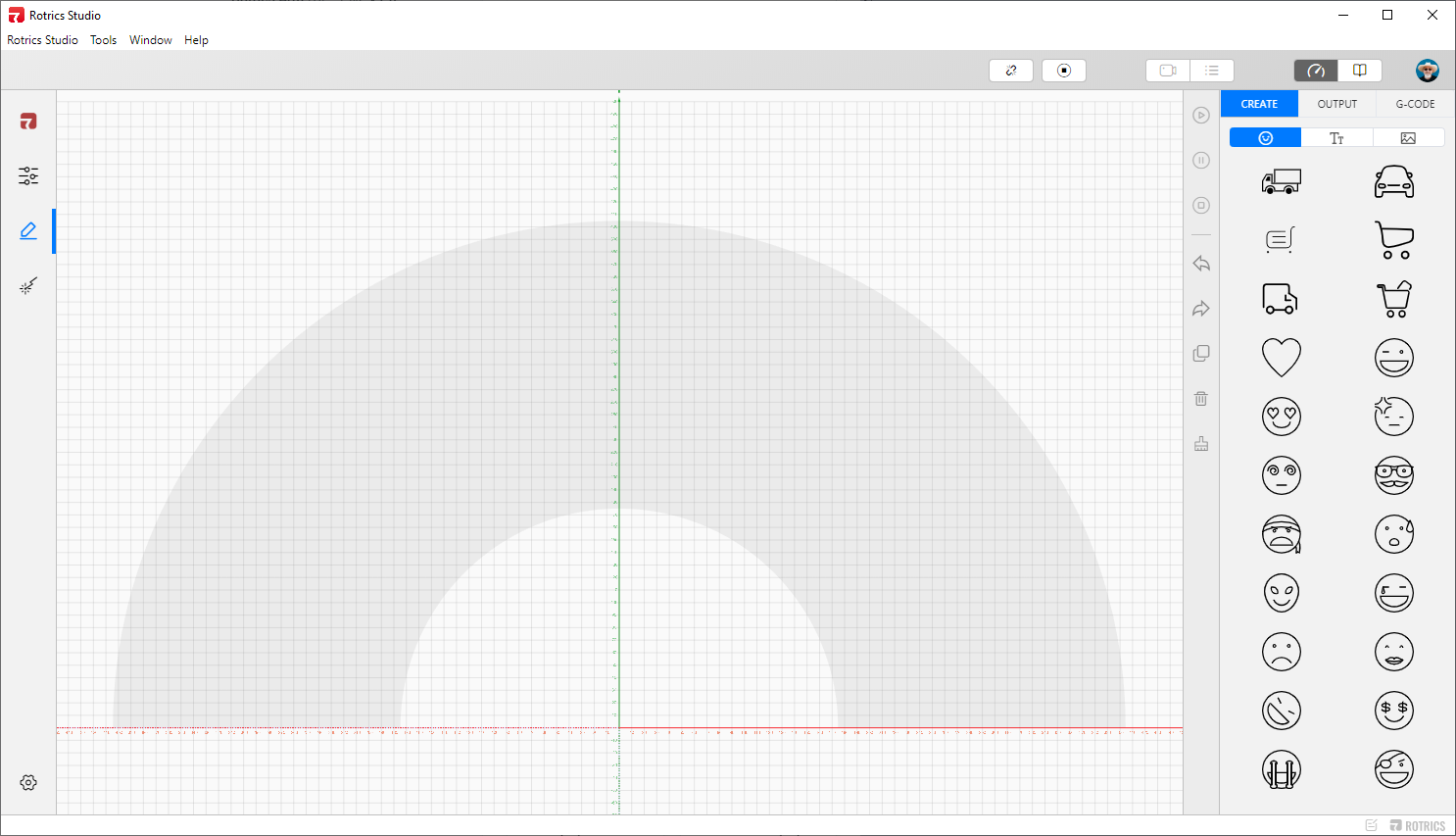
Rotrics Studio软件激光和写字绘画界面展示的灰色工作区域就是在机械坐标系下的工作范围。
当使用第三方软件生成G-code时,需要设定动作坐标偏置(设置工作中心坐标为X300, Y0),或者使用G92指令设定工作坐标系(调整到合适的开始位置后,发送G92 X0 Y0 Z0)。具体会在对应功能生成G-code部分详细说明。