You are not logged in.
- Topics: Active | Unanswered
Pages: 1
#1 2016-10-19 15:39:33
Servo end points
Hi to all ! I need to know how can I defined end points to servo shutter. I know how to defined number of impulses, but shutter misposition - overshoot? Any suggestion how to control this, how to create endpoint of the servo motor?
Offline
#2 2016-10-21 02:28:25
- jcarletto27
- Member
- Registered: 2016-08-10
- Posts: 17
Re: Servo end points
Hi Sacha, in the Setup Panel there are some options for the servo.
if you directly attach the servo to the Pi you can set these to whatever Open and Close values move your shutter to the right place. This takes some trial and error to get right.
here are my settings for starters.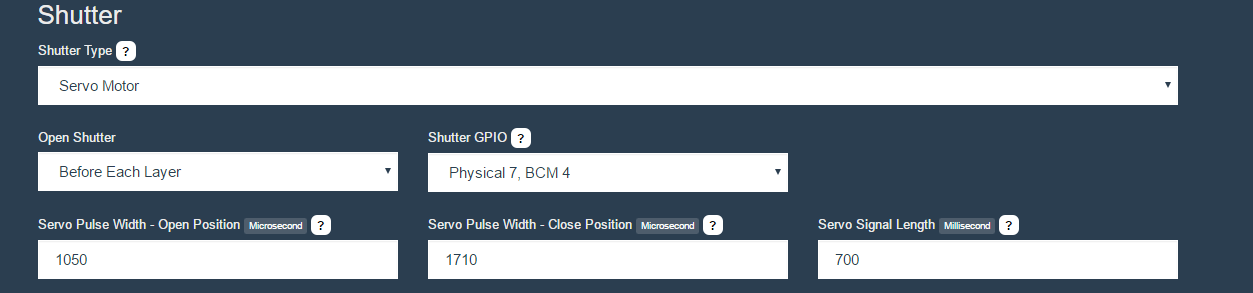
Offline
#3 2016-10-21 09:31:47
Re: Servo end points
Hi jcarletto27,
I did the same way, but shutter some times misposition and opens "the door for the light" . If you press again chose shutter then goes to right position, but in the print this is not possible. I have ask friend how to solve this and he propose 2 option. One is mechanical, by making hard stop bars in witch shutter will hit on one side and on other side too. But this will destroy shutter in short time. Other option is from experience of one guy that drive RC cars. He told me that he can adjust impulses as we doo, make central points for wheels ,to drive strait ( or in our case to close shutter precisely) and also define angle for wheels in both side, like 60 degree and wheels don't go beyond this limits. I don't know how they did this but it will be nice if we can do it same way. I believe that we can do this with stepper motor, some small size, but then we will need another stepper driver and this need to be defined in RPi break board too. Small type like you suggest for NEMA 17 or even smaller. I will try to make same thing with Iris as better option and faster moves. So if somebody can add another stepper driver connection on break board and define procedure in NanoDLP for this, stepper will not mispoint.
Offline
Pages: 1