You are not logged in.
- Topics: Active | Unanswered
Pages: 1
#1 2017-09-30 17:45:50
- georgei
- Member
- Registered: 2017-09-30
- Posts: 20
Boot gcode performed before ramps load.
Hi everyone,
I have a very strange problem that has appeared today.
Whatever I have in the Boot gcode window is not executed.
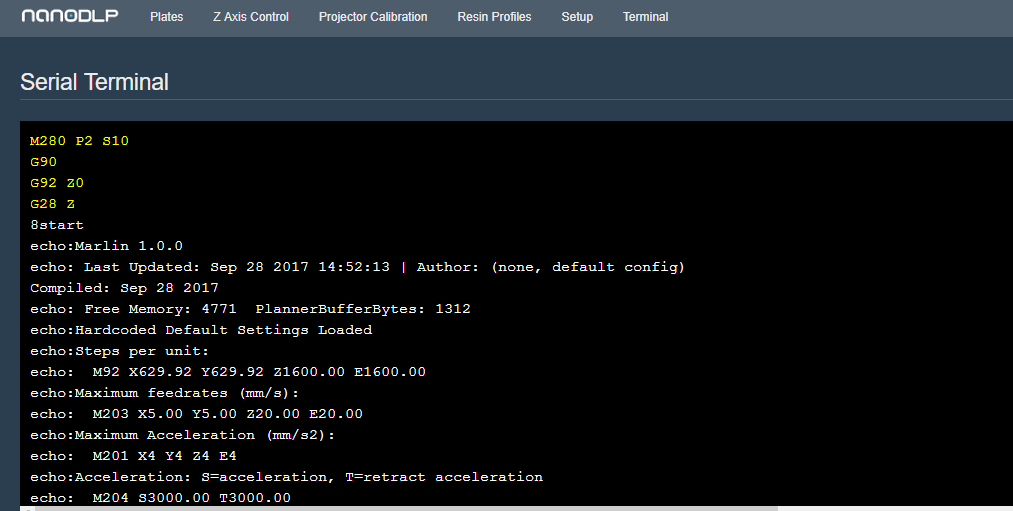
After a lot of search I had a look at the terminal immediately after boot and I see that the boot gcode is executed after the ramps loads.
I have attached an image.
I have try the windows version. There is executes correct the boot gcode.
In other words is waiting first to have communication with the marlin and then sent the commands.
Is this a bug or there something else wrong?
Thank you
George
Offline
#2 2017-09-30 20:33:53
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 1,834
Re: Boot gcode performed before ramps load.
Looks like RPi come up sooner than RAMPS. It should not happen in normal conditions. Use delay keyword as workaround if it you want RAMPS to come up later intentionally.
Offline
#3 2017-09-30 20:38:02
- georgei
- Member
- Registered: 2017-09-30
- Posts: 20
Re: Boot gcode performed before ramps load.
I have use a delay of 10 seconds but still the Boot gcode commands are interlined with the RAMPS.
I am using the Muve version of Marlin.
Is there any way for nano dlp to check that the ramps has boot before it sent these commands?
George
Offline
#4 2017-09-30 20:41:48
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 1,834
Re: Boot gcode performed before ramps load.
You know RAMPS should come up in a second or two. RPi takes way more time to come up. As responses are different for each firmware we could not decide if it really up and running or not.
Check dashboard too, if RAMPS still not up and bootup sequence send out, you should see error message on dashboard.
Offline
#5 2017-09-30 20:52:27
- georgei
- Member
- Registered: 2017-09-30
- Posts: 20
Re: Boot gcode performed before ramps load.
I have add even more delay and now the boot gcode commands are executed but the commands that sends the nanodlp to marlin to reset the servo shutter are still lost.
It looks like that on boot the ramps send some commands to nanodlp that are not know to program.
Have in mind that almost everything is the default settings that come with muve.

Offline
#6 2017-10-01 06:26:39
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 1,834
Re: Boot gcode performed before ramps load.
Could you share content of your bootup gcode box.
Offline
#7 2017-10-01 10:42:36
- georgei
- Member
- Registered: 2017-09-30
- Posts: 20
Re: Boot gcode performed before ramps load.
The boot gcode is very simple:
[[Delay 20]] ; that is the delay I have added
G28 Z ; homing only the Z axis
G92 Z185.7 ; My home switch is at the top so I define the distance from the 0 point.
Nanodlp however is also sending: M280 P2 S10 right at the beginning of the boot that is the command to close the shutter. It sends this command without delay and it is lost (it is not executed because ramps is still booting).
The other problem I have is that 2 out of five restarts ending with the pi stuck or switch off. It is not accessible neither from the nanodlp web interface or putty.
I have to cycle the pi power to restart.
George
Offline
#8 2017-10-02 00:39:58
- Shahin
- Administrator
- Registered: 2016-02-17
- Posts: 1,834
Re: Boot gcode performed before ramps load.
I have tried pi version and it is working correctly. Very strange problem, please send debug file so I could try with your exact settings.
It is PWM library causing issue on restarts. if you do not use shutter on RPi, try comment line below on run.sh.
/usr/local/bin/pigpiod -s 10
Offline
Pages: 1