 Radomir Dopieralski
Radomir DopieralskiEars that move as you move your head.
0%
0%
Mechatronic Ears
Wearable cat ears that move
Wearable cat ears that move
Ears that move as you move your head.
ears.fzzThe printed circuit board.fzz - 53.77 kB - 02/22/2016 at 23:46 |
OK, now that I've shrunk the code for #Nyan Board to 470 bytes, it's time to look at the code for the ears. This time I'm going to got straight into plain C. All I need to do is to figure out how to do analogRead()... Turns out it's super-simple!
#include <avr/io.h>
#include <util/delay.h>
#define MIN(X, Y) (((X) < (Y)) ? (X) : (Y))
int16_t adc(int8_t pin) {
ADMUX = 0<<ADLAR | 0<<REFS1 | 0<<REFS0 | pin & 0x03;
ADCSRA |= 1<<ADSC;
while (ADCSRA & 1<<ADSC) {
// Pass.
}
return ADC - 512;
}
void update_servos(uint8_t left_position, uint8_t right_position) {
static uint8_t current_left = 0;
static uint8_t current_right = 0;
uint8_t left = 17 + MIN(left_position, 15);
if (current_left < left) {
++current_left;
OCR0A = current_left;
} else if (current_left > left) {
--current_left;
OCR0A = current_left;
} else {
OCR0A = 255;
}
uint8_t right = 33 - MIN(right_position, 15);
if (current_right < right) {
++current_right;
OCR0B = current_right;
} else if (current_right > right) {
--current_right;
OCR0B = current_right;
} else {
OCR0B = 255;
}
}
int running_average(int16_t *buffer, uint8_t *cursor,
int16_t *total, int16_t value) {
*total -= buffer[*cursor];
buffer[*cursor] = value;
*total += value;
*cursor = (*cursor + 1) & 0x0F;
return *total >> 4;
}
int main () {
static uint8_t left = 7;
static uint8_t right = 7;
static int16_t x_buffer[16] = {};
static int16_t y_buffer[16] = {};
static int16_t z_buffer[16] = {};
static uint8_t x_cursor = 0;
static uint8_t y_cursor = 0;
static uint8_t z_cursor = 0;
static int16_t x_total = 0;
static int16_t y_total = 0;
static int16_t z_total = 0;
// Init ADC.
ADCSRA = 1<<ADEN | 1<<ADPS2 | 1<<ADPS1 | 1<<ADPS0; // Pre-scaler 128.
// Output pins PB0 and PB1.
DDRB = 1<<0 | 1<<1;
// Setup the PWM clock to ~62.5Hz for the servos.
TCCR0A = 2<<COM0A0 | 2<<COM0B0 | 3<<WGM00;
TCCR0B = 0<<WGM02 | 1<<CS00 | 1<<CS01 | 0<<CS02;
OCR0A = 0;
OCR0B = 0;
while (1) {
int16_t z = running_average(x_buffer, &x_cursor, &x_total, adc(1) - 16);
int16_t y = running_average(y_buffer, &y_cursor, &y_total, adc(2));
int16_t x = running_average(z_buffer, &z_cursor, &z_total, adc(3));
if (x > 20) {
left = 15;
right = 15;
} else if (x < -20) {
left = 0;
right = 0;
} else if (y > 20) {
left = 15;
right = 0;
} else if (y < -20) {
left = 0;
right = 15;
} else {
left = 7;
right = 7;
}
update_servos(left, right);
_delay_ms(60);
}
}The new code is not as minimalistic as in the case of Nyan Board -- in particular, I'm using much more memory here, for all the running average buffers -- but it's nice and small.
AVR Memory Usage ---------------- Device: attiny85 Program: 484 bytes (5.9% Full) (.text + .data + .bootloader) Data: 109 bytes (21.3% Full) (.data + .bss + .noinit)
I just submitted this project to the 1kB challenge too, because I realized that if I only replace the pinMode calls with a suitable DDRB command, I can get it small enough!
Sketch uses 888 bytes (10%) of program storage space. Maximum is 8,192 bytes.
Global variables use 119 bytes (23%) of dynamic memory, leaving 393 bytes for local variables. Maximum is 512 bytes.
You only need to change the setup() function:
void setup() {
DDRB = 1<<0 | 1<<1;
// Setup the PWM clock to ~62.5Hz for the servos.
TCCR0A = 2<<COM0A0 | 2<<COM0B0 | 3<<WGM00;
TCCR0B = 0<<WGM02 | 1<<CS00 | 1<<CS01 | 0<<CS02;
OCR0A = 0;
OCR0B = 0;
}
So today I sat down and wrote all the code for the ears. This time I'm using a running average filter to smooth the signal from the accelerometer (because there wasn't any room for capacitors). I also tried to have a drip integrator to measure "excitement" -- just general speed of changes of acceleration -- but that didn't work too well and I went back to the original logic of the ears.
Here's the size comparison of the current model and the initial prototype:

I guess I could make it smaller if I cut the servo plugs and solder the servos directly, but meh. The battery hides nicely under one of the ears. I should probably wrap the headband with some black tape, to hide the device and the wires, but for now I still want to have access to it.
Here's the code I'm using (the commented out parts are for debugging serial on the servo pins):
//#include <SoftwareSerial.h>
//SoftwareSerial serial(1, 0);
void setup() {
servo_setup();
//serial.begin(9600);
}
void servo_setup() {
pinMode(0, OUTPUT);
pinMode(1, OUTPUT);
// Setup the PWM clock to ~62.5Hz for the servos.
TCCR0A = 2<<COM0A0 | 2<<COM0B0 | 3<<WGM00;
TCCR0B = 0<<WGM02 | 1<<CS00 | 1<<CS01 | 0<<CS02;
OCR0A = 0;
OCR0B = 0;
}
void update_servos(uint8_t left_position, uint8_t right_position) {
static uint8_t current_left = 0;
static uint8_t current_right = 0;
uint8_t left = 17 + min(left_position, 15);
if (current_left < left) {
++current_left;
OCR0A = current_left;
} else if (current_left > left) {
--current_left;
OCR0A = current_left;
} else {
OCR0A = 255;
}
uint8_t right = 33 - min(right_position, 15);
if (current_right < right) {
++current_right;
OCR0B = current_right;
} else if (current_right > right) {
--current_right;
OCR0B = current_right;
} else {
OCR0B = 255;
}
}
int running_average(int *buffer, uint8_t *cursor, int *total, int value) {
*total -= buffer[*cursor];
buffer[*cursor] = value;
*total += value;
*cursor = (*cursor + 1) & 0x0F;
return *total >> 4;
}
void loop() {
static uint8_t left = 7;
static uint8_t right = 7;
static int x_buffer[16] = {};
static int y_buffer[16] = {};
static int z_buffer[16] = {};
static uint8_t x_cursor = 0;
static uint8_t y_cursor = 0;
static uint8_t z_cursor = 0;
static int x_total = 0;
static int y_total = 0;
static int z_total = 0;
static int excitement = 0;
int z = running_average(x_buffer, &x_cursor, &x_total, analogRead(1) - 512 -16);
int y = running_average(y_buffer, &y_cursor, &y_total, analogRead(2) - 512);
int x = running_average(z_buffer, &z_cursor, &z_total, analogRead(3) - 512);
/*
serial.print(x);
serial.print(", ");
serial.print(y);
serial.print(", ");
serial.print(z);
serial.println();
*/
if (x > 20) {
left = 15;
right = 15;
} else if (x < - 20) {
left = 0;
right = 0;
} else if (y > 20) {
left = 15;
right = 0;
} else if (y < -20) {
left = 0;
right = 15;
} else {
left = 7;
right = 7;
}
update_servos(left, right);
delay(60);
}And that's it for this project. Works as intended.
In the future, I might try and make a hat with ears, using larger servos and putting everything inside the hat.
So I also made an attempt at making those servos a little bit more quiet. I opened one of them, and filled it with some servo grease that I ordered from China some time ago. Assembled it back together, and...
Turns out the servo is perfectly quiet now. Unfortunately, that's because it doesn't move.
Turns out that the smallest gear -- the one near the motor -- has to move with such ease, that even a little bit of grease makes it completely stuck. It took me about an hour to clean all the grease from those gears, and the servo works again. As loud as before, though.
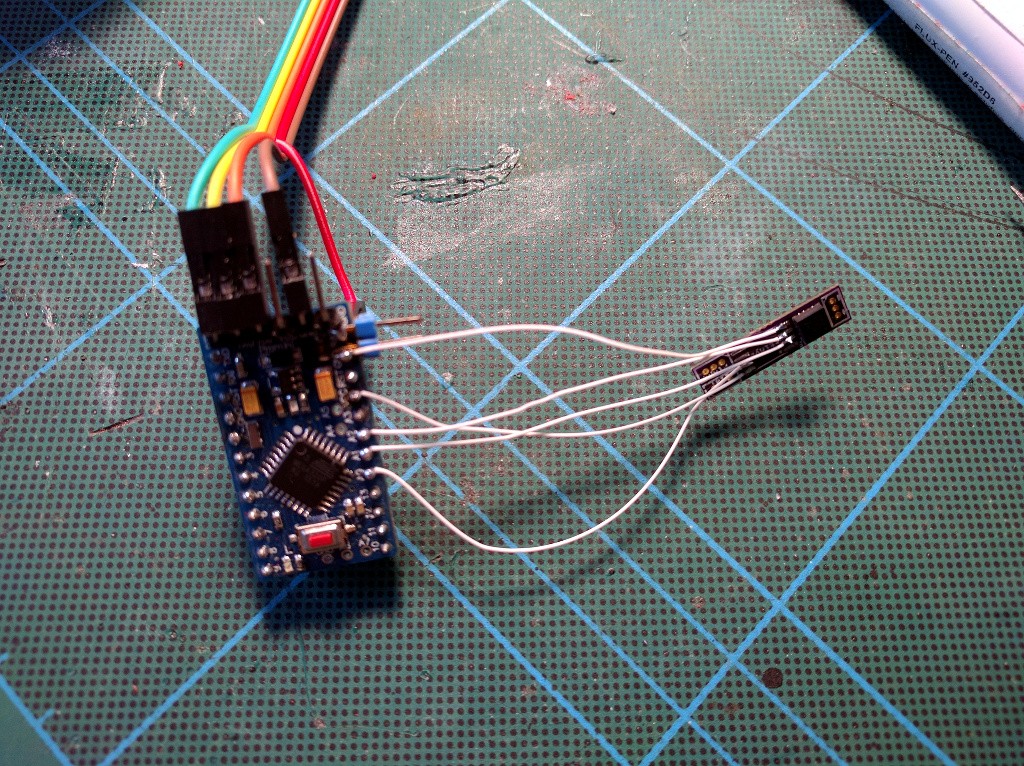
Since all my "current" projects are either waiting for parts, or being punished for not going the way I wanted, I decided to finish this one. I started with connecting all the wires to an ATTiny85 I have soldered to a breakout board. Turns out that the accelerometer connected to the chip's pins doesn't prevent it from being programmed! Yay, that means I can just solder the chip in place and re-program it with a clip.

Next step, I made some connectors for the servo sockets, so that I can use SoftwareSerial on them for debugging. In particular, I needed to check what are the rangers on the accelerometer readings. Turns out that "0" is smack in the middle of the range, at 512, and 1g is about 100 units. Good enough.
Next I will need to check the servo's limits (since I'm not using exactly 50Hz for PWM, they will be different) and actually write the code for the ears-moving logic... I guess for that last part, I will still use the Pro Mini-based prototype. It's simply easier to reprogram.
The PCBs that I wrote about last time were not the real PCBs. OSHPark has made a mistake in the board thickness (a new option that they have), and sent me the boards again, this time thinner. I didn't realize that, so I was quite surprised to see the second shipment, but all is good.
The GY-61 breakout kit also arrived, so I'm ready to try and solder it on that board. This is a "LFCSP LQ" surface-mount package, so impossible to do with a hand soldering iron. At the hackaday channel someone suggested using a kitchen stove, so I have that a try. First, I tinned the board:

A quick sketch lets me verify that the thing works!
void setup() {
Serial.begin(115200);
}
void loop() {
Serial.print(analogRead(A0));
Serial.print(", ");
Serial.print(analogRead(A1));
Serial.print(", ");
Serial.print(analogRead(A2));
Serial.println();
delay(300);
}Now I just need to figure out what are the center values when powered with the battery I want, and write the program.
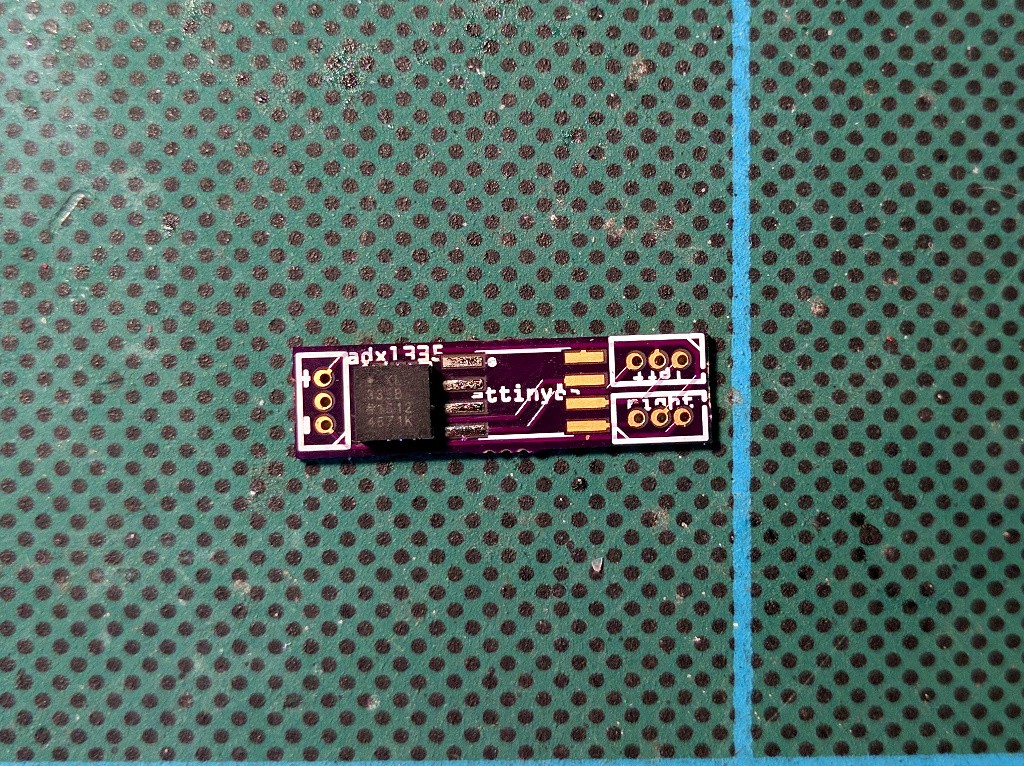
Today the printed circuit boards arrived from OSHPark. I'm still waiting for the accelerometer chip (it will be fun to solder it), though. Here's the size comparison between the new PCBs and the old prototype:

So I decided to go for this miniaturized version, and ordered the PCB at OSHPark. Since it was so small, it's quite cheap. But that means that now I need to port my code to ATtiny85. I can use an Arduino core, but I still need to come up with a way to control the hobby servos. The obvious way is to use Fast PWM mode.
The usual way to do it is to set a timer with two triggers -- one that switches the pin low, and one that resets the counter and switches the pin back to high. This gives you precise control over the exact frequency and duty cycle of the signal. ATtiny85 has two such timers, so I should be all set.
There is a small problem, however. I will also need 3 ADC pins, and one of those is the same as the Timer1 PWM pin. There is an ADC on the reset pin too, but I don't have a high voltage programmer to make use of that. So I can't use the second timer.
What I can do, is to use Timer0 but don't reset it on the second trigger, but let it overflow. Then use the second trigger for the second PWM pin. That however removes the precise control over the frequency -- now I can only use the frequencies that are available with the given prescalers and CPU speeds. Turns out I can do 62.5Hz with the ATtiny85 at 1Mhz. This is close enough for most servos.
With some diving into the datasheet and a bit of experimenting, I came up with this code:
void setup() {
pinMode(0, OUTPUT);
pinMode(1, OUTPUT);
// Setup the PWM clock to ~62.5Hz for the servos.
TCCR0A = 2<<COM0A0 | 2<<COM0B0 | 3<<WGM00;
TCCR0B = 0<<WGM02 | 1<<CS00 | 1<<CS01 | 0<<CS02;
OCR0A = 0;
OCR0B = 0;
}
void loop() {
for (int i=10; i<30; ++i) {
OCR0A = i;
OCR0B = i;
delay(100);
}
}Note that since I'm messing with Timer0, which is also used by the Arduino core to keep track of millis(), the delay() is no longer accurate. But I can live with that.Here's the servo in action:
So I've been thinking... If I were to do it seriously, I would probably drop the Pro Mini and use an ATtiny85 instead, with a custom, small PCB to contain the whole thing. It would be small enough to actually fit on the band holding the ears, something like this:
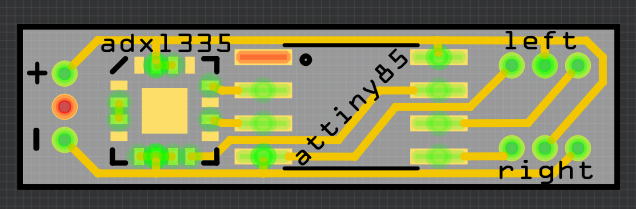
That's 23×6.5mm, and could be made even smaller if I populated both sides... Then of course the battery would need to go into one of the ears, and there also needs to be a power switch...
This is the first prototype version, but still here's the source code if you are interested in how it's done:
#include <Servo.h>
Servo servos[2];
void move(int position) {
static int current = -1;
if (position == current) {
return;
}
current = position;
servos[0].attach(9); // right
servos[1].attach(10); // left
switch (position) {
case 0:
// Perk up.
servos[0].writeMicroseconds(1500 + 300);
servos[1].writeMicroseconds(1500 - 300);
Serial.println("perk");
break;
case 1:
// Droop down
servos[0].writeMicroseconds(1500 - 300);
servos[1].writeMicroseconds(1500 + 300);
Serial.println("droop");
break;
case 2:
servos[0].writeMicroseconds(1500 + 300);
servos[1].writeMicroseconds(1500 + 300);
Serial.println("left");
break;
case 3:
servos[0].writeMicroseconds(1500 - 300);
servos[1].writeMicroseconds(1500 - 300);
Serial.println("right");
break;
default:
Serial.println("unknown");
}
}
void rest() {
servos[0].detach();
servos[1].detach();
}
void setup() {
Serial.begin(115200);
move(0);
}
void loop() {
int z = analogRead(A0) - 490;
int y = analogRead(A1) - 490;
int x = analogRead(A2) - 490;
Serial.print(x);
Serial.print(", ");
Serial.print(y);
Serial.print(", ");
Serial.print(z);
Serial.println();
if (x > -10) {
if (y > 10) {
move(2);
} else if (y < -10) {
move(3);
} else {
move(0);
}
} else {
move(1);
}
delay(600);
rest();
}
Get the PCB from https://oshpark.com/shared_projects/JQpvX13E
You can also take the Fritzing file from the repository, generate Gerber files and order it somewhere else, or even make the PCB yourself.
Apply the solder paste, place the ATtiny85, capacitor and the accelerometer, and heat carefully with a heat gun or a reflow oven.
Solder the servo plugs and the power plug normally.

No, I have not. To be honest, I'm a little nervous about applying 1.5A of current to heat to 100°C something on my head...
Don't get me wrong, I love the idea of memory materials, and this would be very quiet. But they are usually triggered by temperature, which is a problem.
yes and microbit could lie flat on top of head, or as base of one of the ears with servo on top. I'd be happy to make 3D printed part to hold servos and ears if it helps. At least it has place for Lipo and accel already on board... We just have to agree on servos. I made simple holder here:
http://www.thingiverse.com/thing:1165549 and I have a couple of tiny Bluebird servos like this one (need to look up exact model number). Could make an openscad resizeable mount so coudl accomodate several servos... http://www.servodatabase.com/servo/blue-bird/bms-306
Looks good! You could also 3D-print the levers inside the ears -- I used the servo horns, which are straight and not very elastic. If you 3D-printed a nice thin curved piece of plastic instead, it could work much better.
Say, why don't you just make your own version of this? I'm sure it will be lots of fun.
OK. I can't quite see from the pics how you're engineering the ear, lever vs hinge etc. Is there a link where someone has drawn it out for reference.
You can see the servo with the horns before it was inserted into the ear here: 
Basically one servo horn is attached to the servo itself, and three are joined together and attached to the axle. Then that is inserted into the ear, and the ends of the horns are fastened to the corners of the ear, like this:
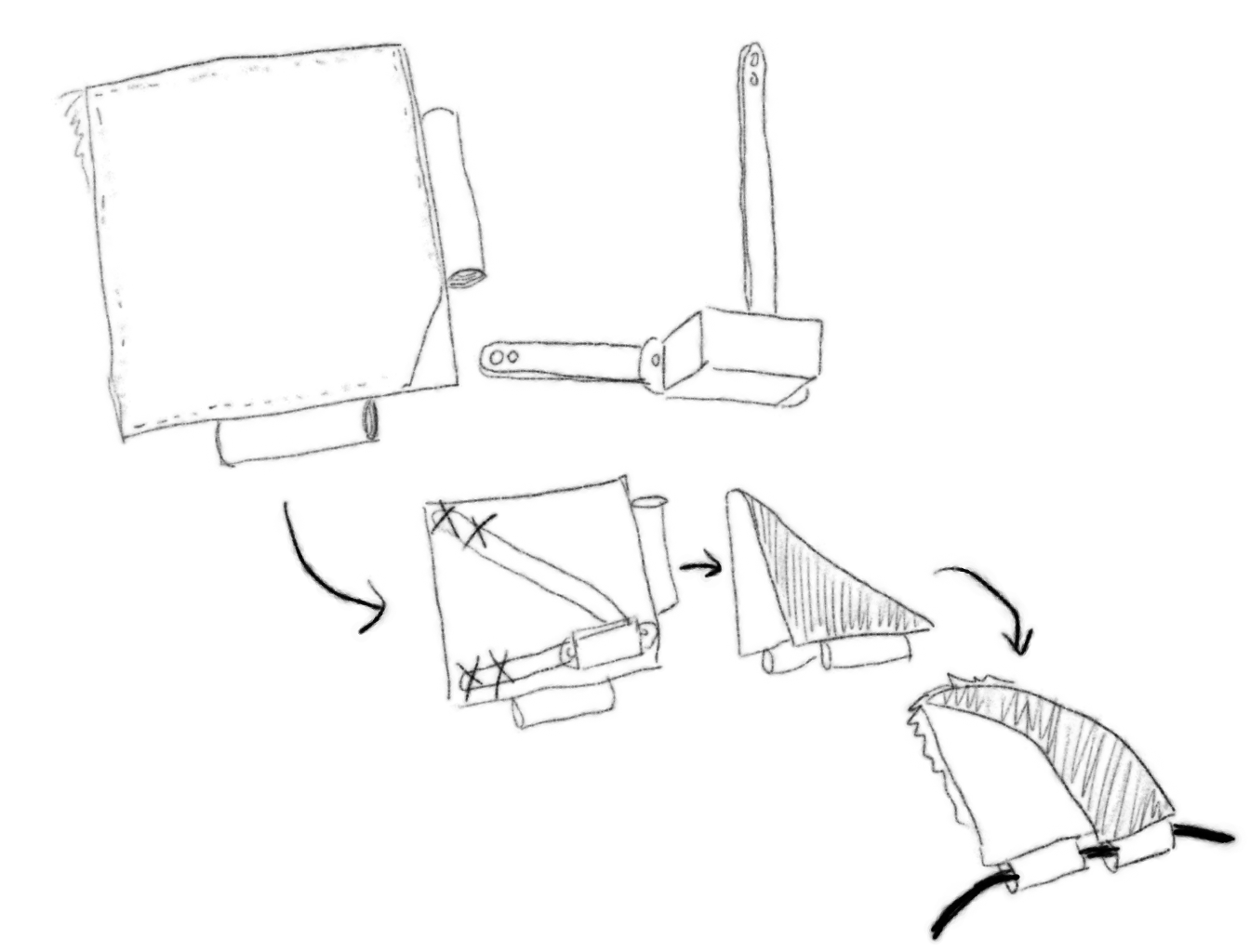
I hope that helps.
Very nice - where's the microbit version :)
Must be a simple way to acoustically silence those servos...
Funny you mention that, I was actually thinking about making a micro:bit version of this. I would probably have to put it in a hat, as micro:bit is considerably larger, but it would be quite straightforward.
The servos are quite small, so I suppose I could wrap them in something... I also want to try adding more grease to their drive train -- it could help.
 txdo.msk
txdo.msk W4KRL
W4KRL
have you thought about using muscle wire instead of servos? https://www.sparkfun.com/products/11900 IIRC MS are using it as the latch mechanism in the new surface tablets