This is a quick guide to help people assemble the Arduino CNC Shield.
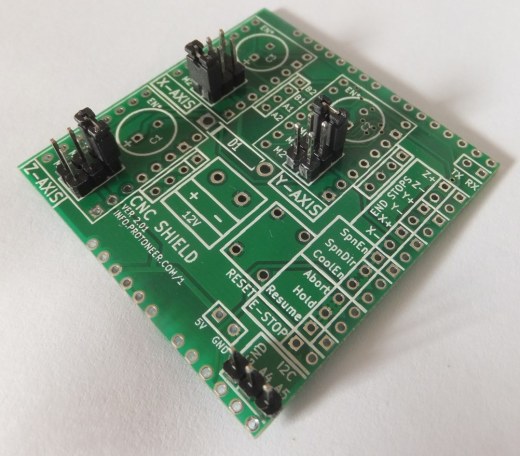
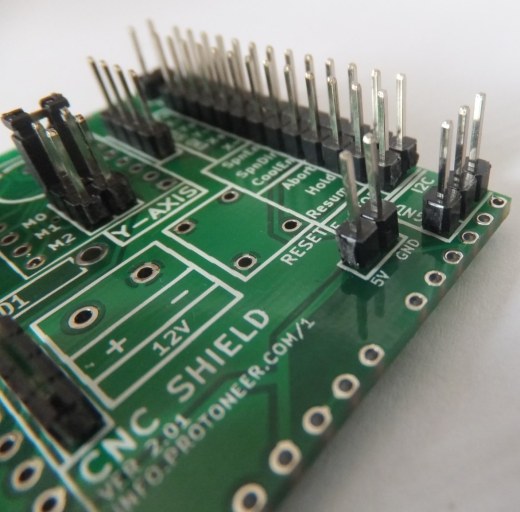
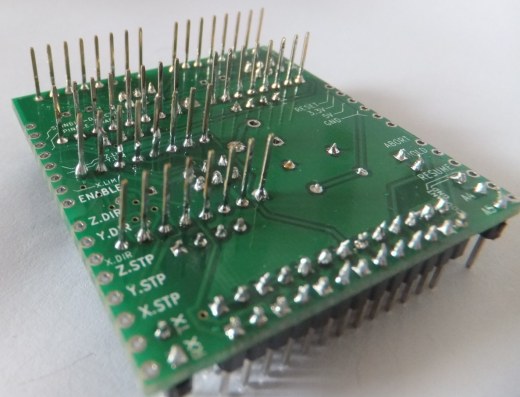
1. I usually start of soldering the jumper pins in place. The easiest way to do this is to insert a jumper to keep the two rows of pins aligned. At the same time I also insert the I2C pins and then turn the board over to solder the pins in place. (The I2C pins ensures that the board does wobble while you soldering.)
2. The breakout pins are next. I find that it’s easier to soldering one row at a time starting with the inside row. That way the second rows pins are not in the way. 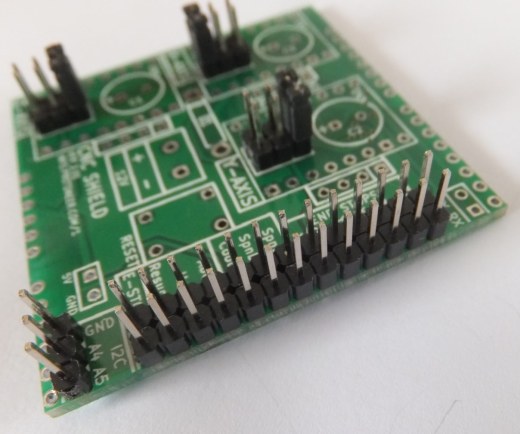
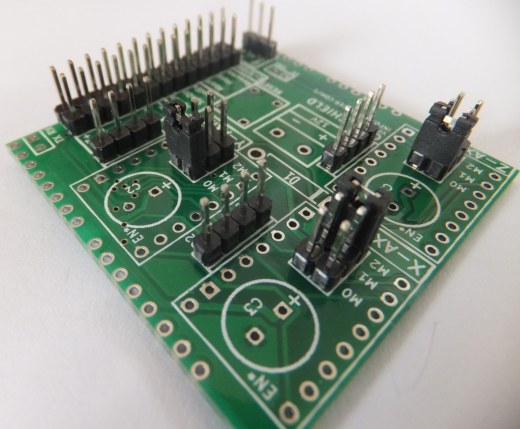
3. The motor pins are soldered in place.
4. RX/TX pins next.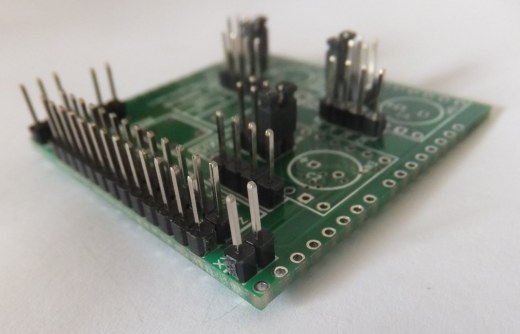
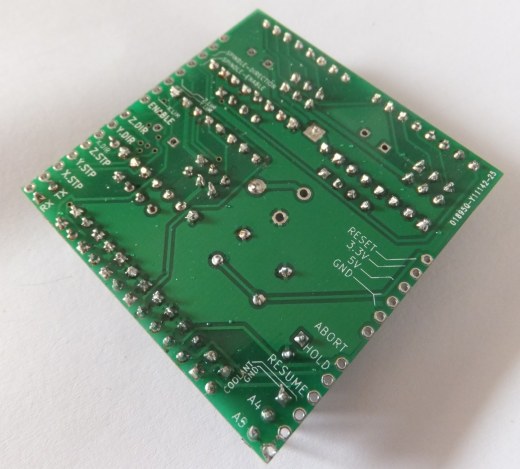
5. 5V breakout pins
6. Reset button
7. D1(Diode) was intended to prevent users from damaging the board by accidentally reversing the polarity on the high voltage line. Unfortunately this feature was abandoned because I could not find a big enough Diode that would handle 6 amps at a time and still fit on the board. The work around for this is to solder in a jumper wire (Yellow Wire).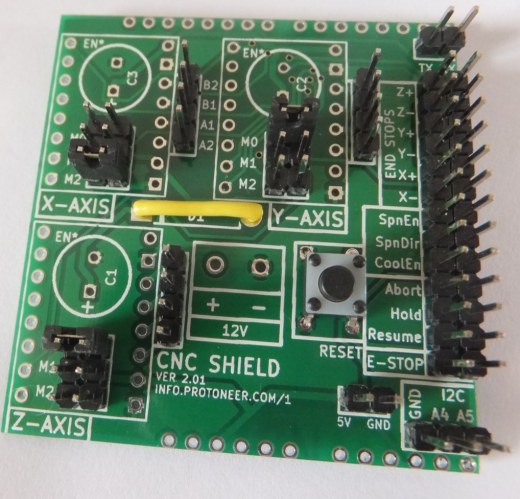
8. Soldering the stepper drivers in place can be made easier by installing the stepper drivers while soldering the headers in place.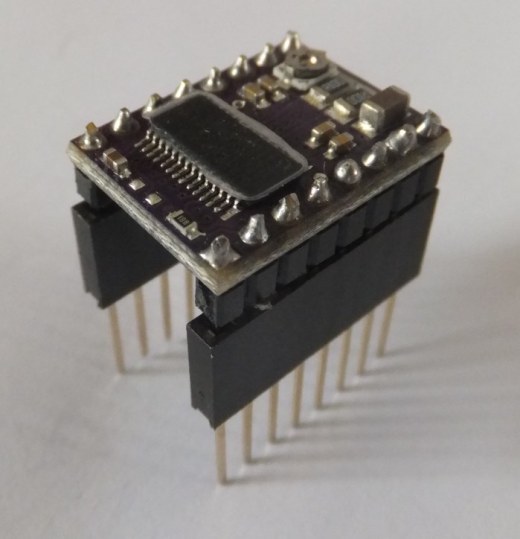
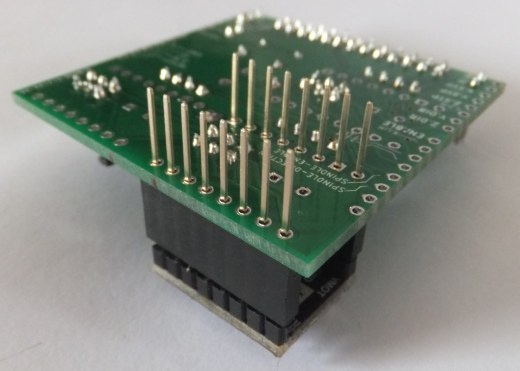
9. Depending on the type of headers included with the kit, trimming might be needed to remove the excess pin lengths.
10. Soldering the capacitors in place needs a bit of care. The capacitors are polar and need to be installed the right way around. In the picture below you can see that Ground sign (-) is facing in one direction. Please make sure that you solder them in correctly or they will release the magic smoke that makes them work.. 😉 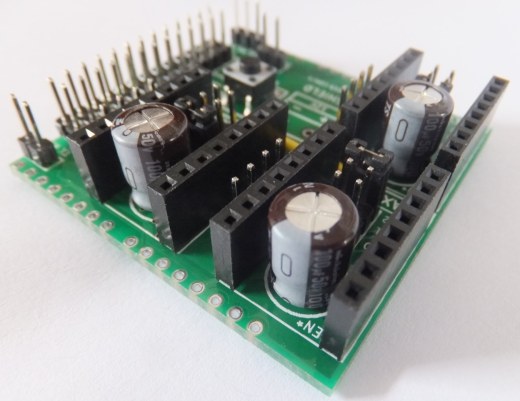
11. Almost done, next is the screw terminal for the high voltage input.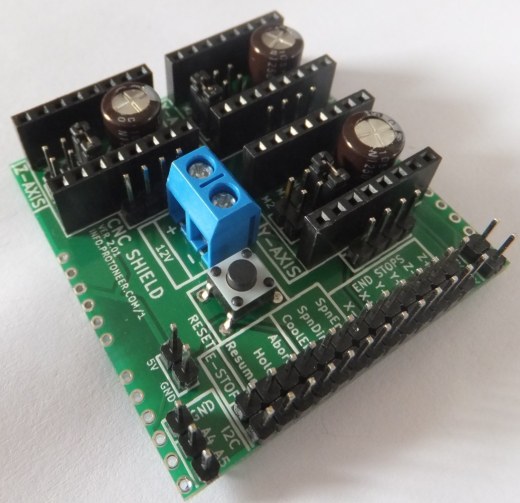 12. Last bit is to install the headers that will plug into the Arduino Board. I usually plug the board into an Arduino board and solder it place. By doing this you ensure that the headers are aligned.
12. Last bit is to install the headers that will plug into the Arduino Board. I usually plug the board into an Arduino board and solder it place. By doing this you ensure that the headers are aligned.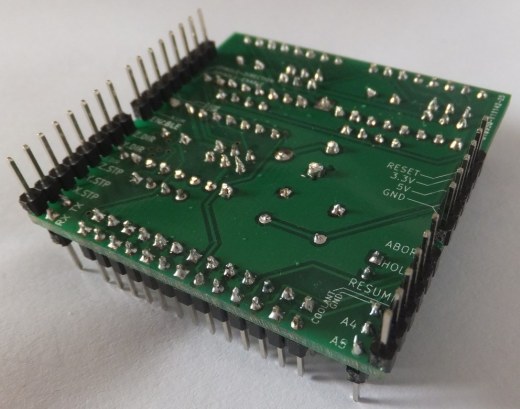
First Run
To make sure all parts function as they should, we need to go through a pre-flight checklist.
Pre-flight Checklist
- Do a visual check of all soldered points on the new board.
- Plug the shield into an Arduino board with a pre-installed copy of the GRBL Firmware.
- Open up a serial connection to the Arduino board and check if GRBL is running.(I use Putty to connect to GRBL)
- Pololu stepper drivers need adjustment and it’s good to have a read through their online manuals at Pololu.com
- Testing each stepper controller socket individually is critical.
- Make sure the external high voltage power is not power-up or connected
- Connect a stepper motor to the stepper controller socket you want to test. This is very important because the Pololu Stepper drivers are designed to ramp up the current till it reaches the needed current to run. Without stepper motor connected there will be nothing to consume the current and you can end up damaging the stepper driver if it over-heats in the process.
- Next install the stepper motor driver ensuring that the enable pin on the driver aligns with the enable pin on the shield.
- Connect the external power to the shield, making sure you connect the power up the right way. If not connected the right way you can cause damage to the shield, stepper motor drivers and Arduino board.
- Send a g-Code to the Axis you are testing. The stepper motor should move if everything is working. (GCode Example : “G1 X5” or “G1 X0” or “G1 Y5”)
- Repeat the above process with each axis using the same stepper driver.(Testing with one driver reduces the risk of damaging multiple stepper drivers at the same time.)
- After all the above have been checked connect all the drivers and power up the system.
Tips and info
- When the stepper drivers are enabled they will make funny vibrating noises. This is normal. For more details have a look at this wiki page(Chopper Drivers).
- The stepper drivers will get warm and need cooling if they are going to be used for long periods. Small heat sinks and extractor fans are advised.
- Having extra stepper drivers is always handy.
- Some of the stepper drivers have thermal protection and will cut out if the temperature gets to high. This is a good sign that they need cooling or that they are over powered.
Related Posts
 Arduino CNC Shield V3.XX – Assembly Guide
Arduino CNC Shield V3.XX – Assembly Guide Arduino CNC Shield Project Builds – Turning a A3 Printer into CNC Machine
Arduino CNC Shield Project Builds – Turning a A3 Printer into CNC Machine Protoneer CNC Shield + Alamode + Raspberry Pi CNC Controller
Protoneer CNC Shield + Alamode + Raspberry Pi CNC Controller Arduino CNC – GRBL Shields / Boards
Arduino CNC – GRBL Shields / Boards Arduino CNC Shield – 100% GRBL Compatable
Arduino CNC Shield – 100% GRBL Compatable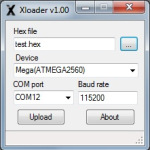 Quick GRBL setup guide for Windows (Arduino G-Code Interpreter)
Quick GRBL setup guide for Windows (Arduino G-Code Interpreter)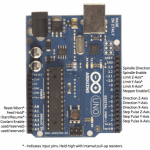 Grbl (Arduino G-Code Processor) – Pin Layout
Grbl (Arduino G-Code Processor) – Pin Layout Opensource CNC controller written for Arduino’s (G-code interpreter GRBL)
Opensource CNC controller written for Arduino’s (G-code interpreter GRBL)










Pingback: Arduino CNC Shield – 100% GRBL Compatable | Protoneer.co.nz
HI..
Great guild but I would have done the link and switch first as they are the lowest then the headers and caps and then the other side, you could plug the sheild pins into the UNO and then solder the them to the board.
Auzze
Thanks Auzze… I agree, doing the lower profile components first makes it easier.