OpenROV.Org is a community funded project that introduces people to Do-It-Yourself ocean exploring.
Specs:
Dimensions: 30cm x 20cm x 15cm
Weight: 2.5kg
Depth rating: ~100m
Speed: 1m/sec
Power: 8 onboard C batteries
Run time: ~1.5 hours
Design:
Body construction: Laser cut acrylic
Buoyancy: Inherently neutrally buoyant
Propulsion: 3 brushless motors (2 horizontal thrusters, 1 vertical thruster)
Tether: 1 single twisted pair communicating 10 megabit ethernet data for control and video
Control: Onboard embedded linux computer (beagleboard brand) controlled via remote web browser
Vision: Forward facing HD USB webcam and two 87lm LED light arrays on servo-tiltable platform
Design considerations: Completely open source / open hardware, off the shelf parts, small enough to test in a bathtub, kit can be assembled in one weekend, standardized payload bay.
Related Posts
 Sketchbot – From a Webcam Image to a drawing in sand. (Halfway around the world)
Sketchbot – From a Webcam Image to a drawing in sand. (Halfway around the world) Amazing Warehouse Automation (Little orange rack lifting robots)
Amazing Warehouse Automation (Little orange rack lifting robots)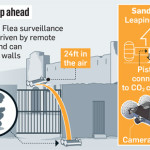 Jumping Robot – Sand Flea
Jumping Robot – Sand Flea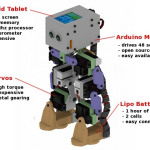 Bipedal Robot
Bipedal Robot Amazing Delta/Parallel Robot Video’s
Amazing Delta/Parallel Robot Video’s Tesla Model S – How robots are changing our world.
Tesla Model S – How robots are changing our world. Robotic Farm Workers – Farm Automation
Robotic Farm Workers – Farm Automation World’s most advanced prosthetic arm (Bionic arm)
World’s most advanced prosthetic arm (Bionic arm)










Sharp!