开始示教和搬运
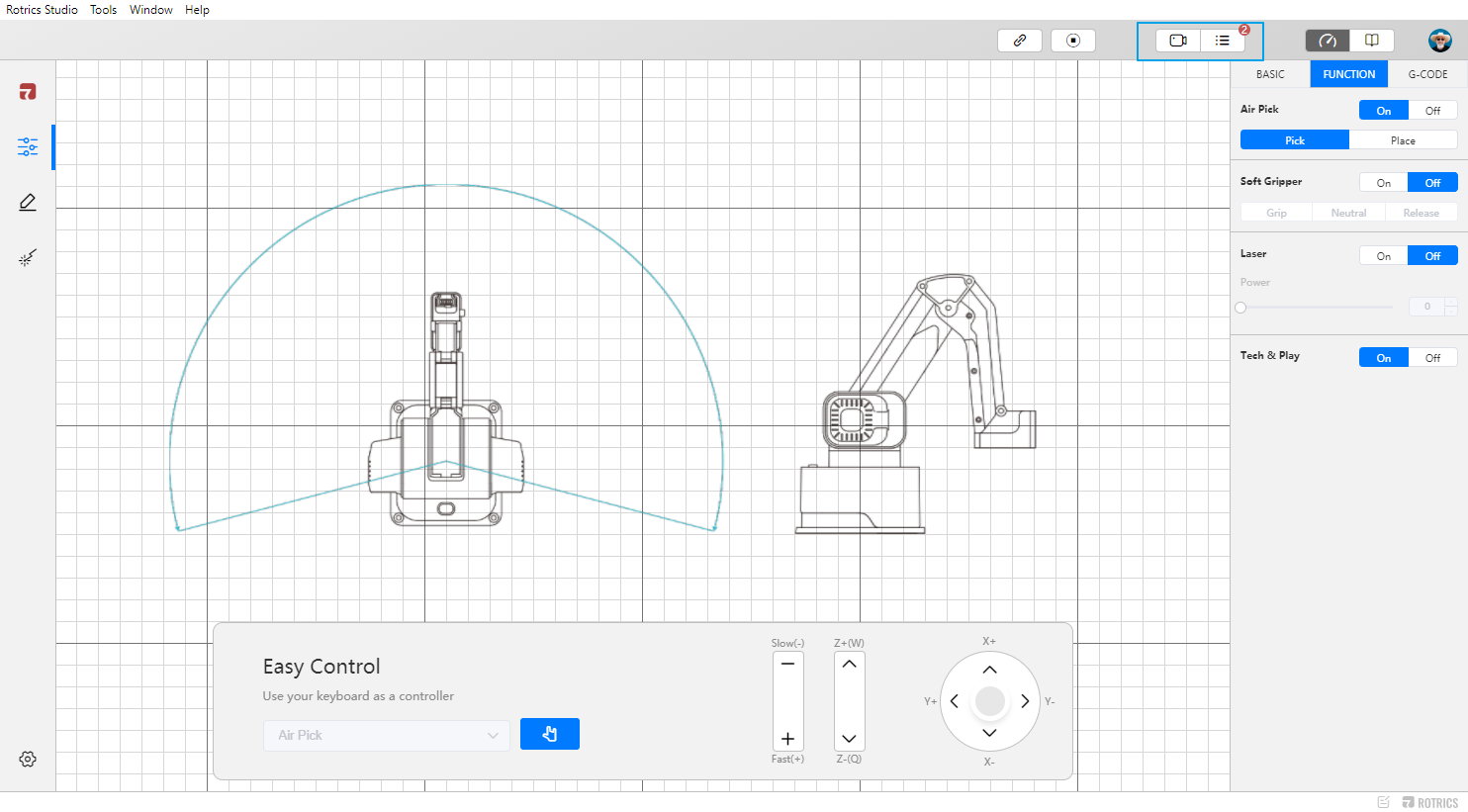
Rotrics的气动搬运功能可以通过Rotrics Studio控制并记录下机械臂的运动实现,也可以编写G-code程序控制机械臂运动,实现搬运。
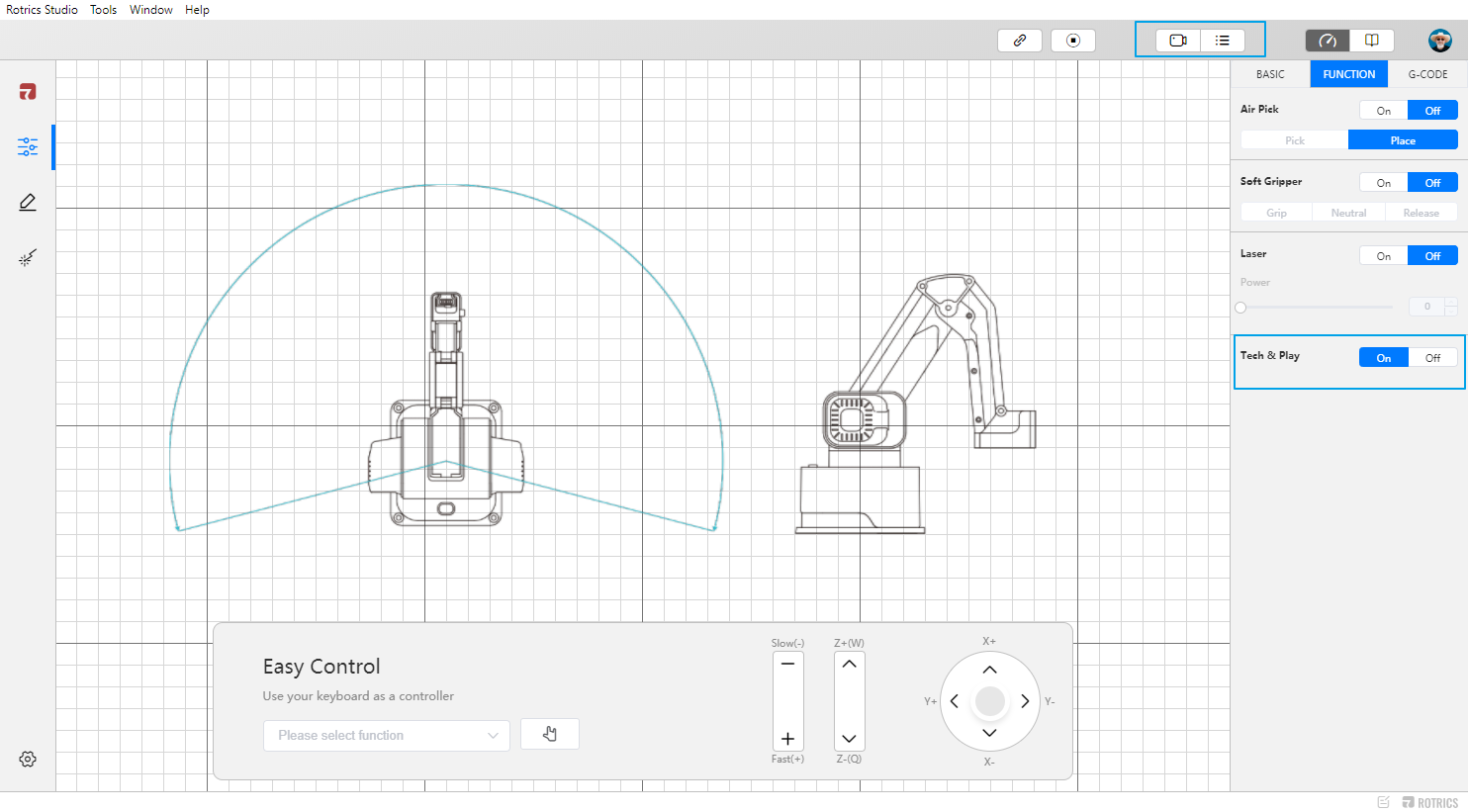
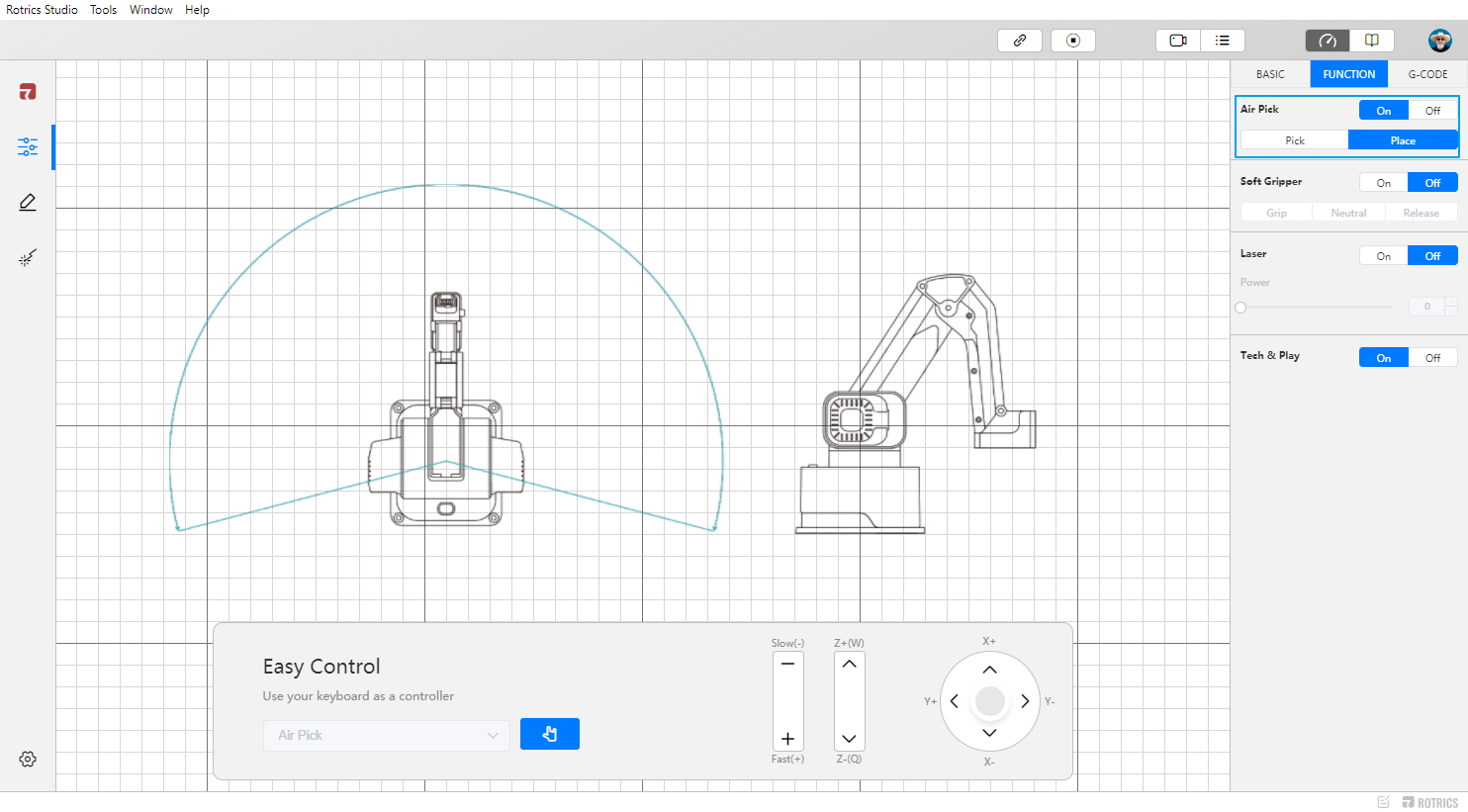
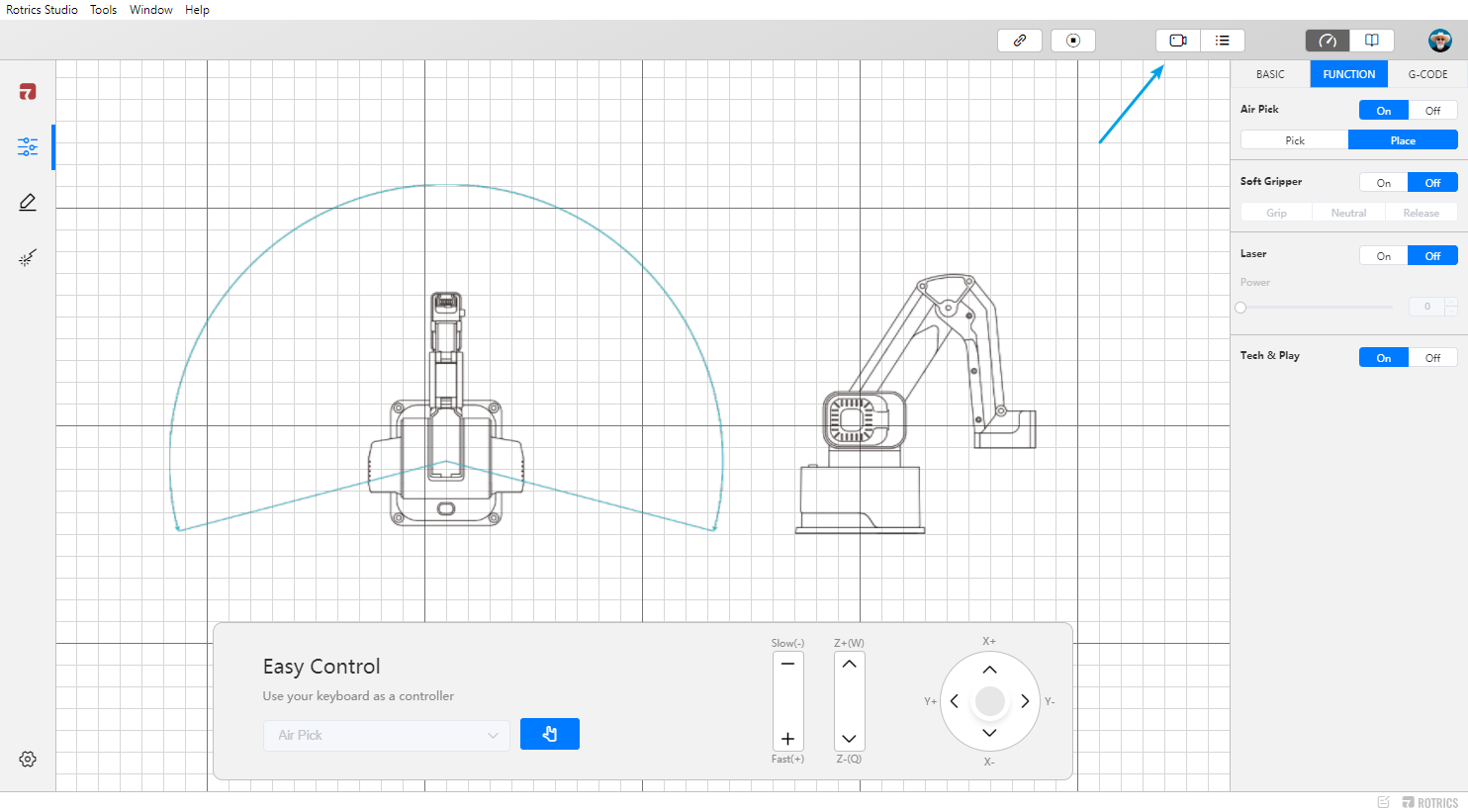
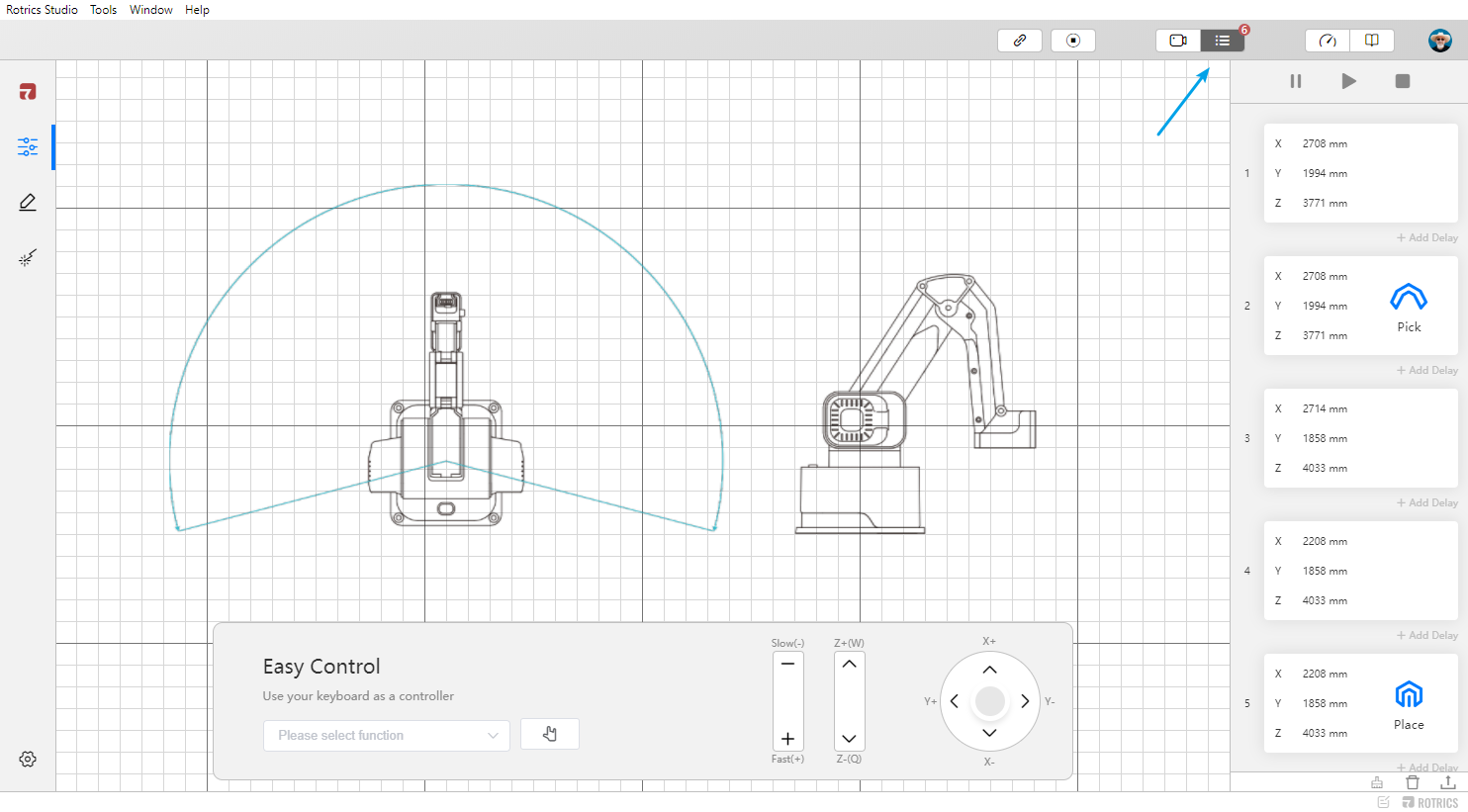
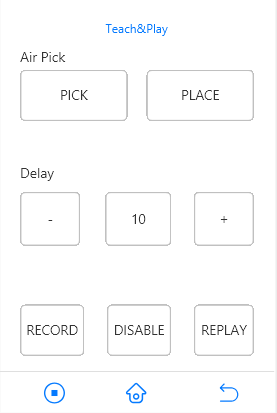
此时顶部的Record和Record List按钮会变为可用状态。
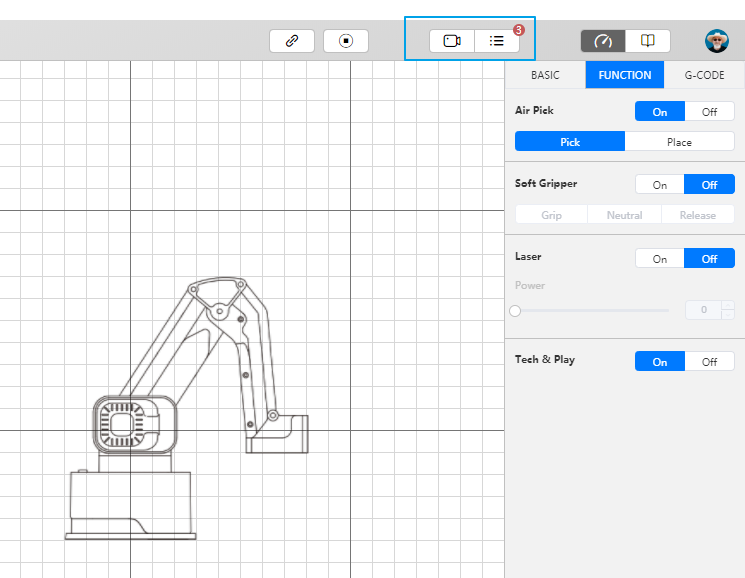
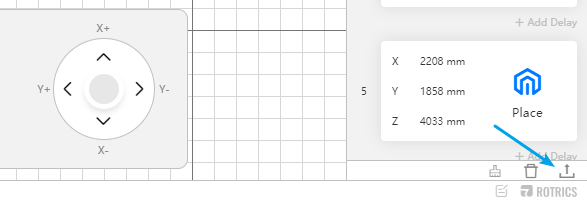
此时可以看到Recrod List右上角显示已经记录了一个示教动作。
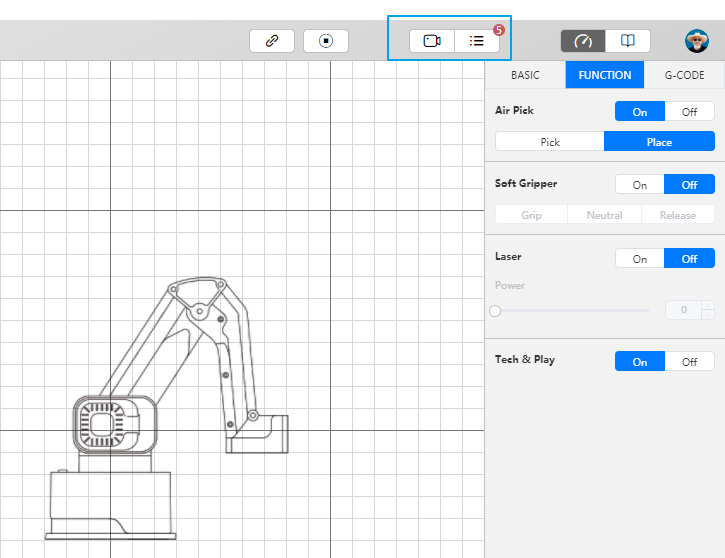
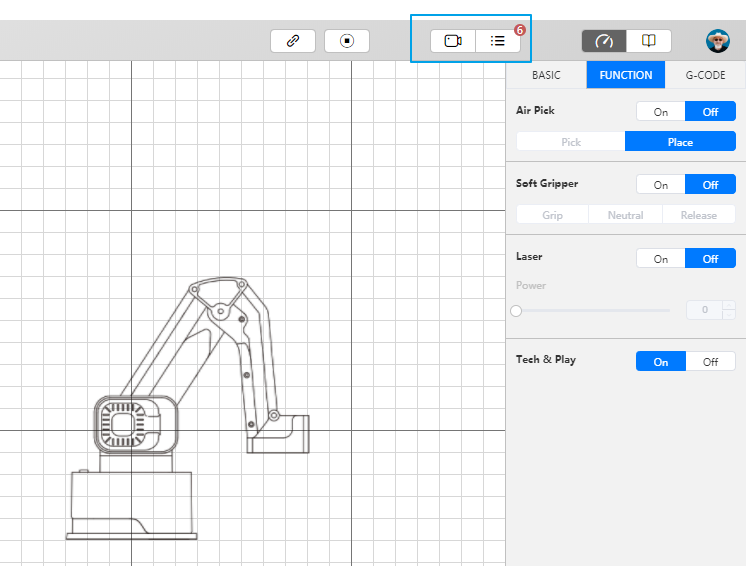
💡Tips: 如果使用柔性爪进行示教搬运,在Grip抓取物品之前 ,需要先Release,再下降到对应位置,然后再Grip。
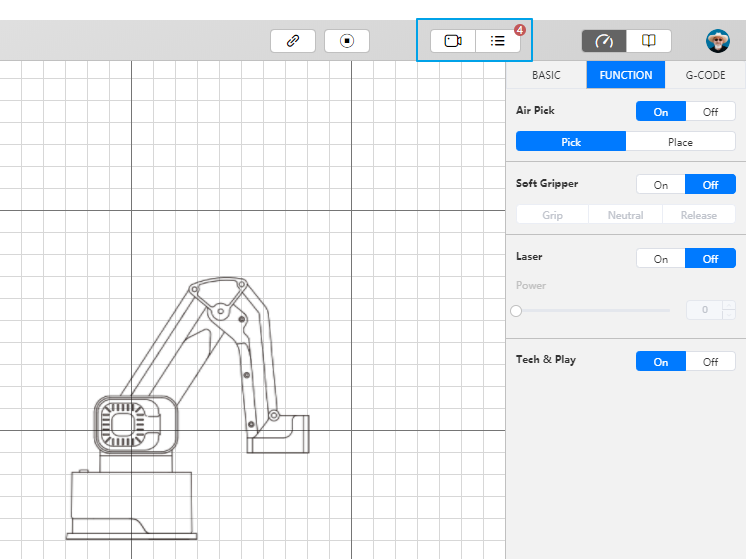
💡Tips: 为了防止机械臂在运动过程中误碰撞到搬运的物体,需要让机械臂按照门型的轨迹运动,也就是先抬升一段距离,再移动到目标点上方一定高度,再向下移动。
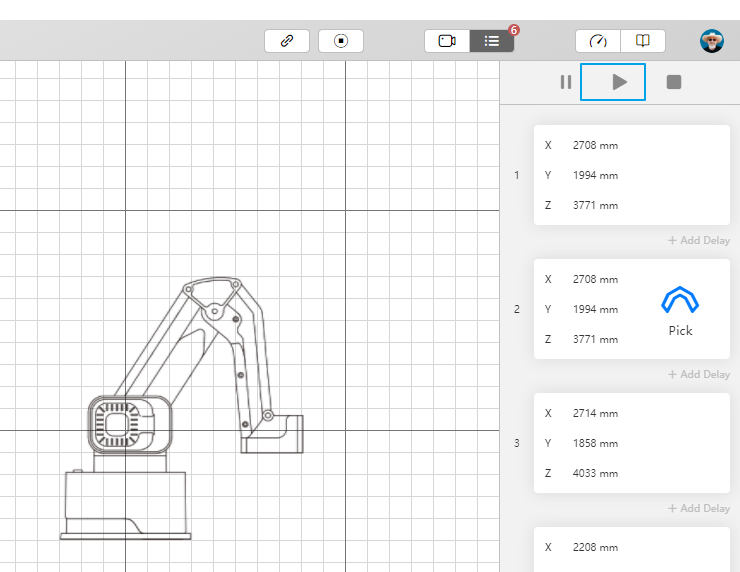
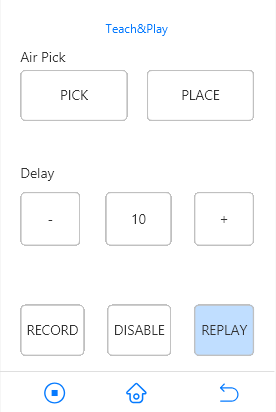
目前只支持复现一次示教动作,后续版本会增加多次循环示教的功能。
如果现在需要进行循环示教动作,需要点击底部的Export按钮导出G-code文件,复制多次,机械臂即可按照示教动作循环运动。
如果Replay之后,还需要增加新的示教动作,需要点击Teach&Play的OFF,重新点击ON之后再记录新的动作。
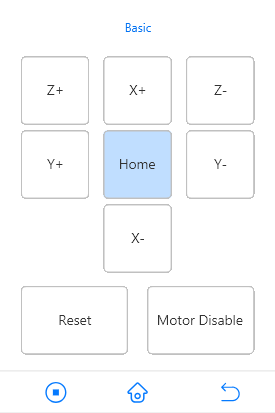
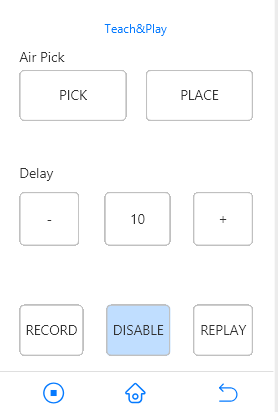
Disable会使得电机失力,从而可以拖动前端模块的位置。
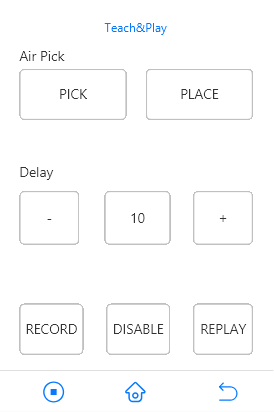
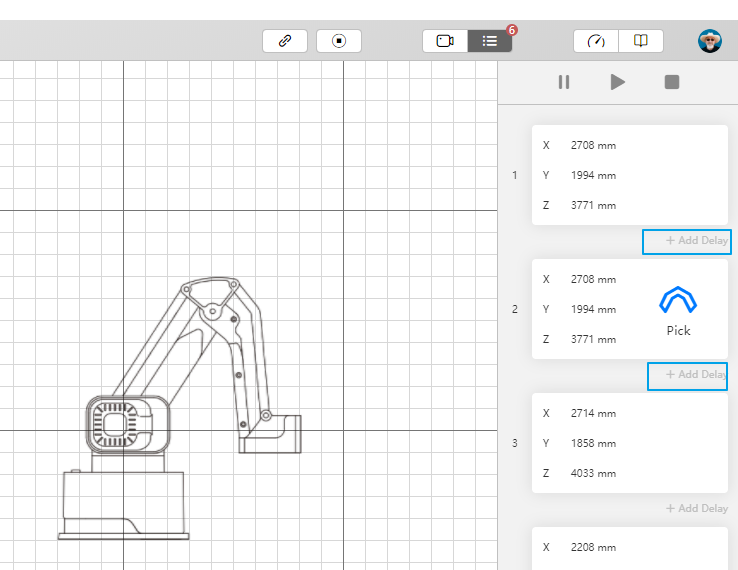
在每次记录点之后,可以在下一个点之前添加延时指令,使机械臂等待一段时间后再执行下一步。
使用G-code进行气动搬运工作,需要先新建一个.gcode文件,使用系统自带的记事本程序或者第三方的文本编辑器打开(比如Notepad++),在其中输入机械臂运动控制指令,完成后通过Rotrics Studio软件发送给机械臂即可进行气动搬运工作。
运动控制指令:
G0 X300 Y20 Z0- 机械臂运动到点(300,20,0)G0 F3000- 设置速度为3000mm/min;M2000- 设置机械臂以直线模式运动;M2001- 设置机械臂以快速模式运动;
气泵控制指令:
M888 P2- 设置前端模块为气动模块;M1000- 气泵吸气;M1001 -气泵吹气 ;M1002- 气泵泄气 ,泄气气阀打开 ;M1003- 所有气泵气阀停止工作;
A.使用M888 P2指令设置前端模块为气动模块;
B. 使用M2000 或M2001设置机械臂运动模式;
C. 使用G0指令控制机械臂的运动;
D. 使用M1000 - M1003指令控制气泵的工作;
其中柔性爪和吸盘的气泵动作是相反的,具体说明如下:
吸盘工作过程:
使用
M1000使气泵吸气,拾取物品;使用
M1002使气泵泄气,释放气泵内部压力,放下物品;使用
M1003关闭所有气泵气阀;
柔性爪工作过程:
使用
M1001使气泵吹气,使柔性爪抓紧,抓取物品;使用
M1000使气泵吸气,使柔性爪松开,放下物品;每次停止柔性爪的使用时,先使用
M1002使气泵泄气,释放气泵内部压力;再使用
M1003关闭所有气泵气阀;
吸盘
柔性爪