使用气动模块基本功能
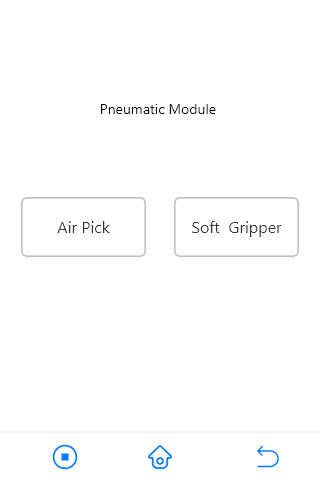
气泵盒子有三种工作状态,吸气、吹气、泄气,以及关闭所有气阀。
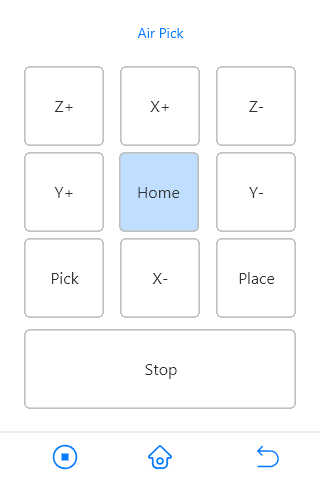
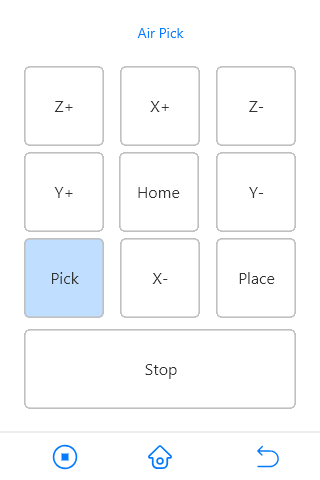
吸盘有两种工作状态,拾取(吸气),放置(泄气)。每次搬运只需控制气泵吸气和泄气即可。
柔性爪有三种工作状态,夹取(吹气)、放置(吸气)、中性(泄气)。每次搬运除了控制气泵吸气和吹气之外,每次搬运动作之后,还需控制柔性爪处于中性状态。
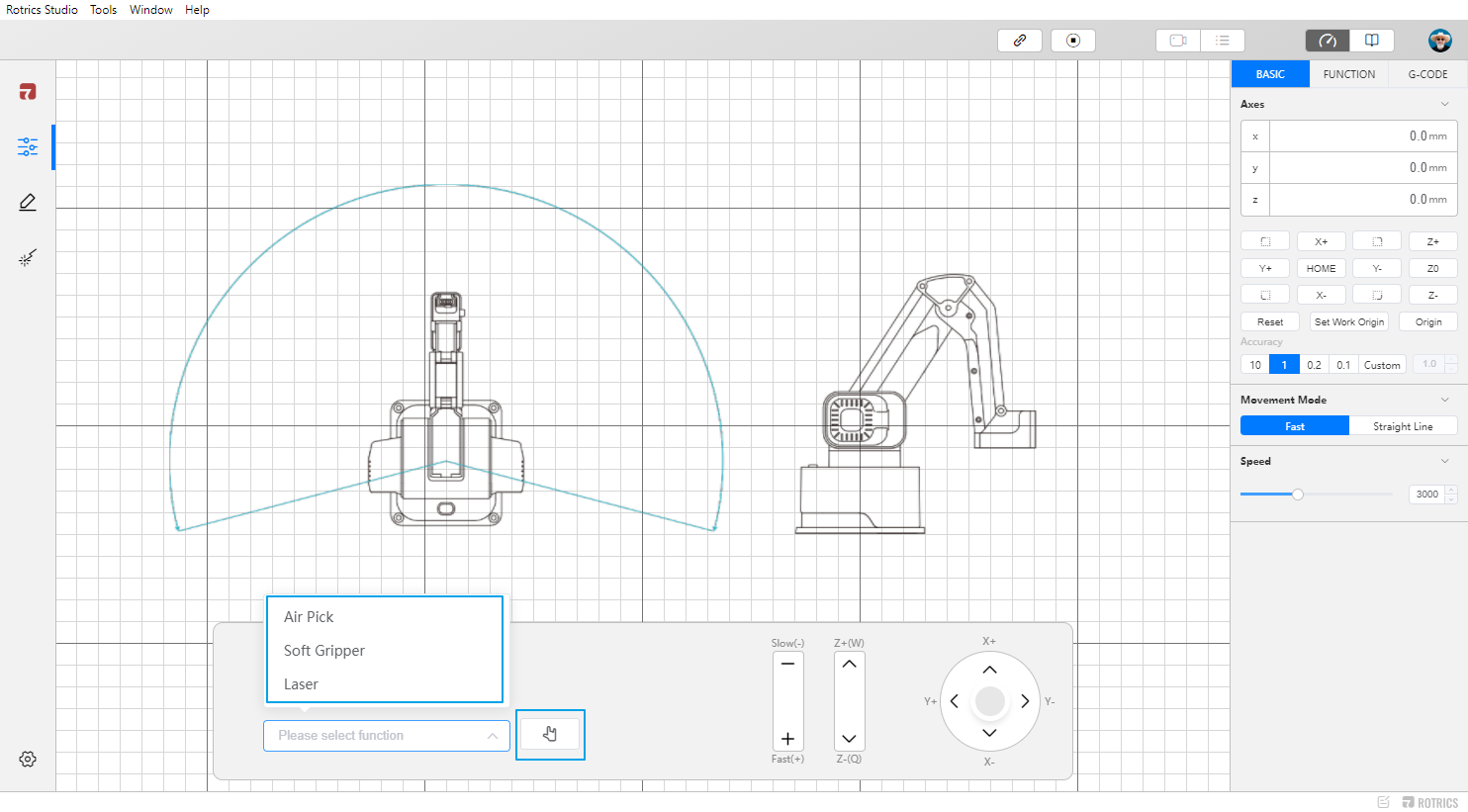
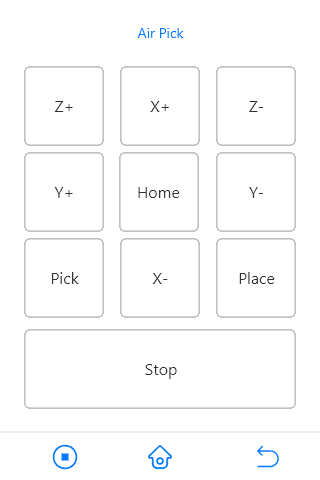
点击之后右侧会打开对应的Function界面
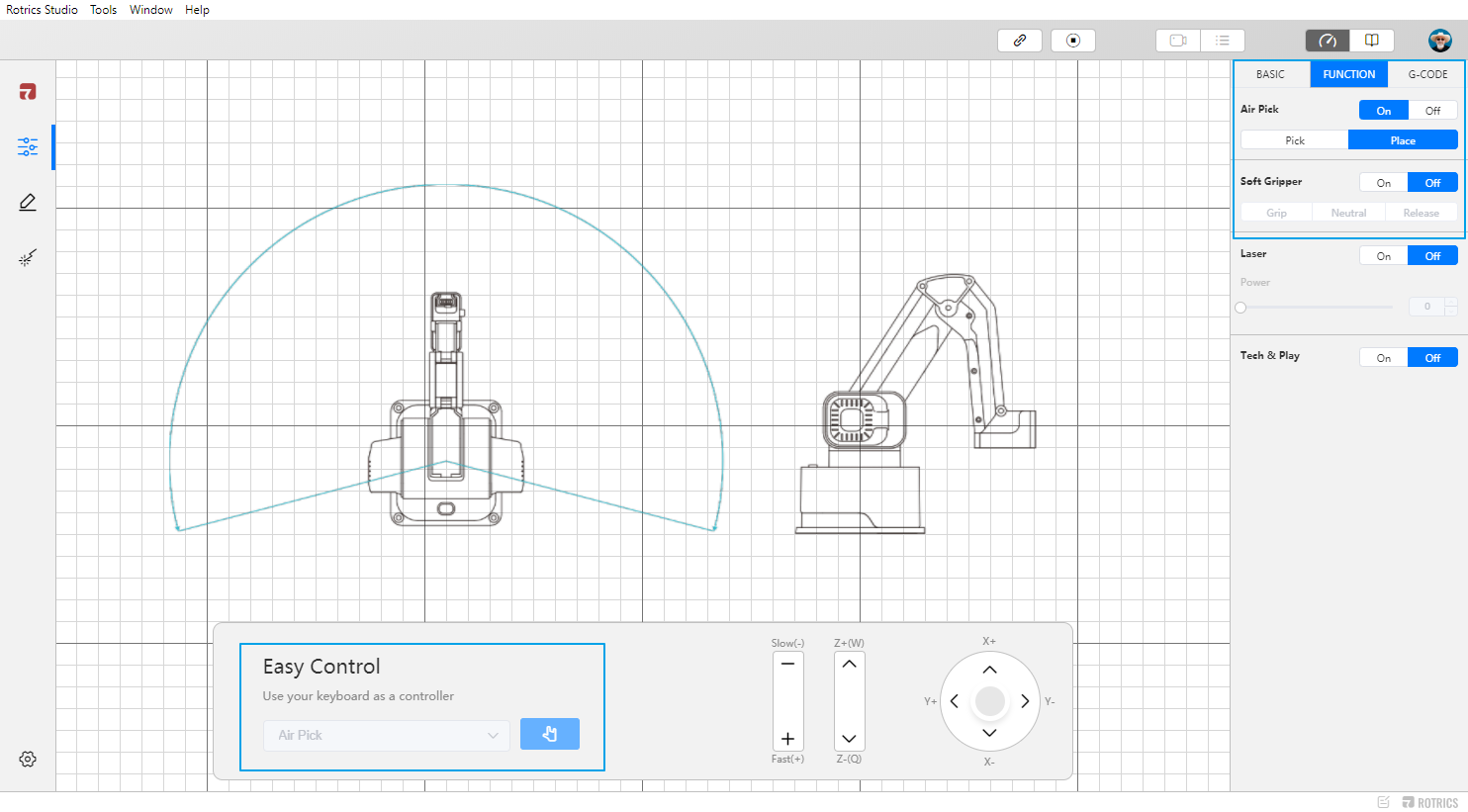
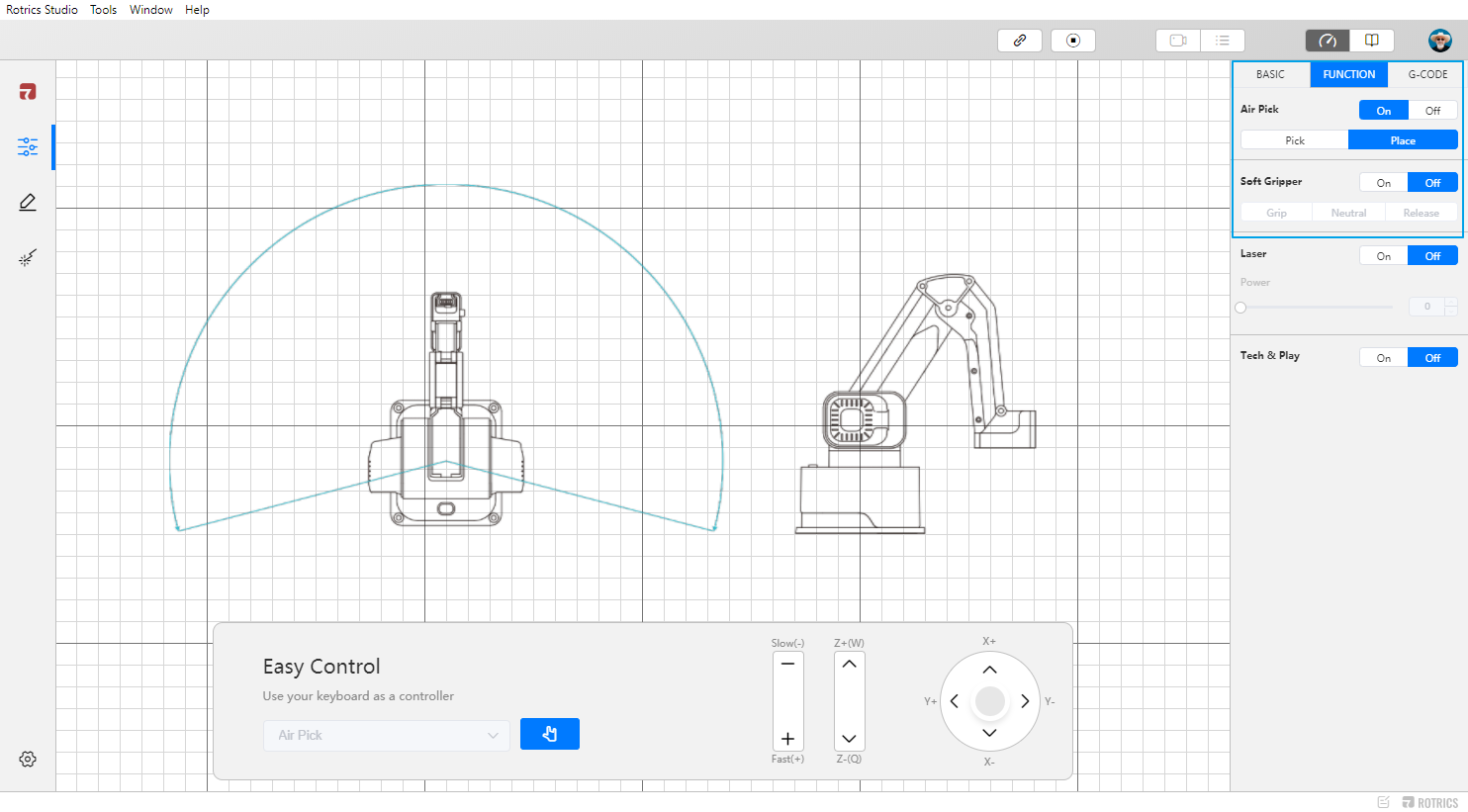
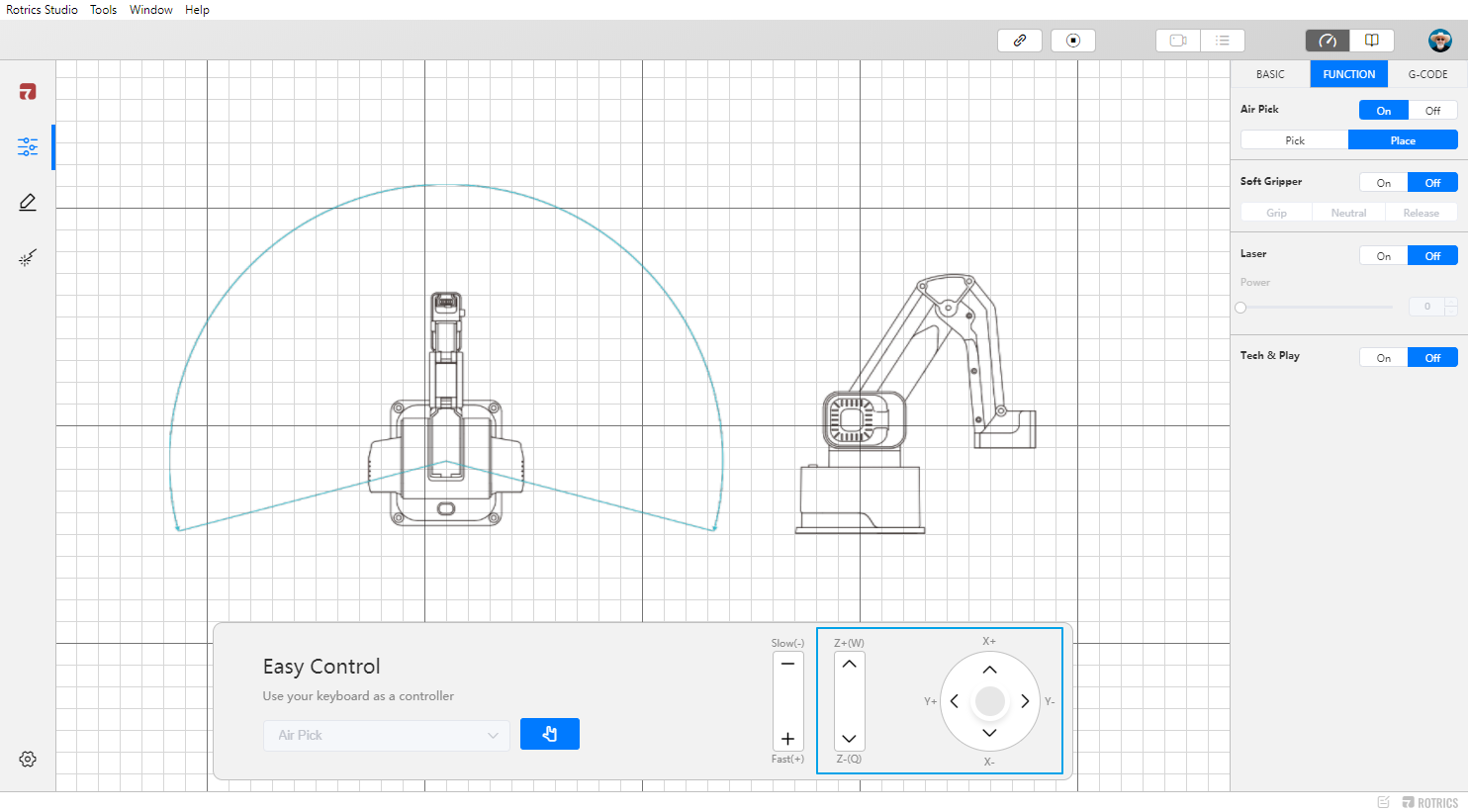
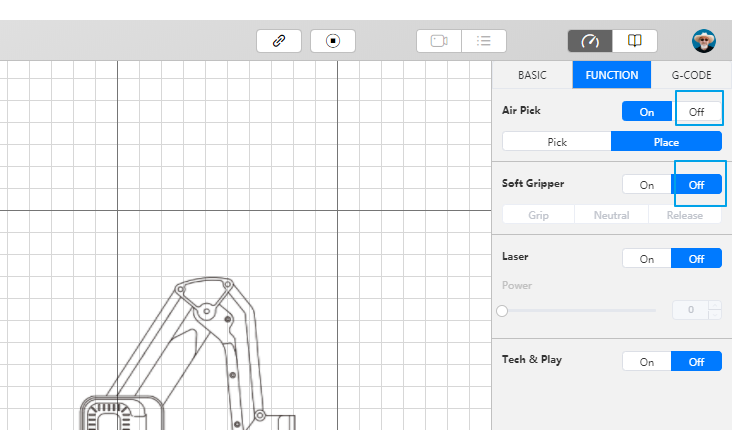
此处以Air Pick为例,Soft Gripper则对应操作。
最近更新 10 months ago
气泵盒子有三种工作状态,吸气、吹气、泄气,以及关闭所有气阀。
吸盘有两种工作状态,拾取(吸气),放置(泄气)。每次搬运只需控制气泵吸气和泄气即可。
柔性爪有三种工作状态,夹取(吹气)、放置(吸气)、中性(泄气)。每次搬运除了控制气泵吸气和吹气之外,每次搬运动作之后,还需控制柔性爪处于中性状态。
点击之后右侧会打开对应的Function界面
此处以Air Pick为例,Soft Gripper则对应操作。