You are not logged in.
- Topics: Active | Unanswered
#1 Re: Help and Support » Documentation for external HW » 2018-01-09 04:57:44
Scroll to the bottom of this page for HW info
https://www.nanodlp.com/download/
#2 Re: Help and Support » mosfet low output voltage » 2017-11-22 06:11:47
you should end up with something like this 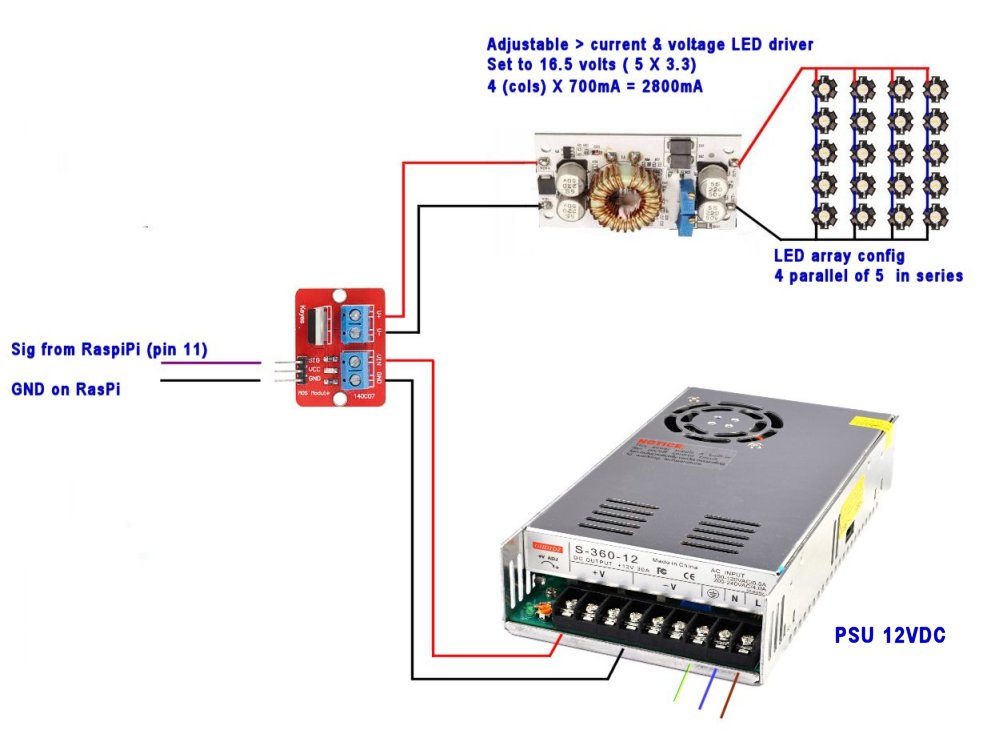
#3 Re: Help and Support » mosfet low output voltage » 2017-11-22 05:12:37
so from your sketch it would appear you have one of these 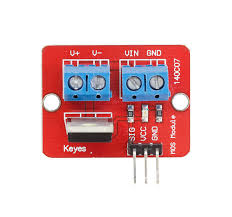
and this is the corresponding schematic 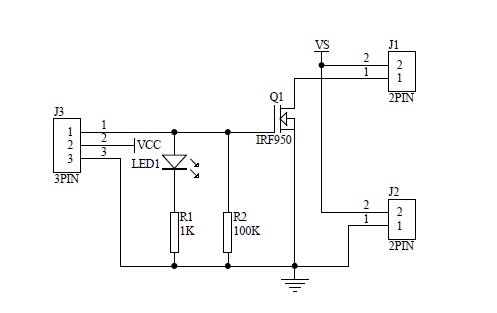
#4 Re: Help and Support » mosfet low output voltage » 2017-11-21 02:42:24
Any chance you could post a few more details on your "MOSFET" and LED array?
A lot depends on how your LED array is configured and powered. Typically the LEDs have their own power supply ( often called a driver)
You should consider joining https://plus.google.com/communities/109 … 7401814291
There's a ton of info there
#5 Re: Help and Support » mosfet low output voltage » 2017-11-20 03:42:26
A stepper driver draws way too much current to be powered from the Raspi directly. Added to which the stepper driver needs at least 12VDC to drive a Nema 17.
I would normally use a 12VDC power supply Then use a buck converter to power the Raspi and wire the stepper driver directly to the PSU ( usually with an in line fuse)
Then a similar buck / boost converter with current limiting for the LED array
I couldn't see/ open your "mosfet_wiring.tif " ??
#6 Re: Help and Support » mosfet low output voltage » 2017-11-20 00:07:24
There are potentially quite a few issues re your set up. Any chance you could sketch your wiring layout?
The LED array needs a separate power source ( current limited)
The MOSFET switches this power source
The MOSFET is typically placed "downstream"- i,e it switches the negative side of the LED array to ground
#7 Re: Help and Support » Lead screw pitch change » 2017-11-13 02:33:23
Hi. An 8 mm pitch sounds much too big for any lead screw I've ever seen. Are you sure that's correct.
Its your control boards firmware that needs to know the steps per mm as well
#8 Re: Help and Support » Lead screw pitch change » 2017-11-13 01:36:28
have you tried adjusting the settings on the main set up page > Actuator/Motor
#9 Re: Help and Support » nanodlp + wanhao d7 + ookuma castable resin » 2017-11-10 09:05:43
Import a profile from somebody then try a dry run ( no resin in vat) when its working you can edit the various sections to suit your particular resin
#10 Re: Help and Support » nanodlp + wanhao d7 + ookuma castable resin » 2017-11-09 11:00:02
It is often best to use an existing profile ( imported or default) and edit that. Im confident somebody on the D7 FB page would share a working profile ( I don't have a D7 or use FB so can't help sorry)
#11 Re: Help and Support » Pi3 Direct Drive Wiring Help » 2017-11-09 03:27:48
SHould indeed give a finer resolution. All it means is that 12800 steps will equal 1 rotation.
If for example, you use a lead screw with a 2mm pitch, 12800 steps will give you 2mm of Z travel.
Not sure exactly with direct control but normally a "steps/mm" ( steps per millimeter) is required as a configuration input So using the example above you would input 6400 as being the steps required to travel Z 1mm
#12 Re: Help and Support » Pi3 Direct Drive Wiring Help » 2017-11-09 02:31:43
Yes, i think its fair to assume the 4th pin is ground and a reference for the S,D & E signals.
Set all the DIP switches to "ON" to give 32 microsteps on the DRV8825 ( 200 X 32 = 6400) So 6400 steps will give you 1 rotation of the stepper motor ( assuming you're using a 1.8 deg stepper motor = most common Nema 17)
VM and the adjacent G(nd) pin are for 12VDC for the motor ( needs at least a 1.5 amp power supply)
5V & G(nd) are from the Raspi
( note its always important that the Gnd from the Raspi & Gnd from the VM are tied together which I believe is the case on the 2 middle pins of the 4 pin power in arrangement)
#13 Re: Help and Support » Pi3 Direct Drive Wiring Help » 2017-11-07 02:00:52
Hi . Yes i understand your intent but the only stepper driver they have on the BG website has 3 pins on the right hand side not 4 pins like your photo ( KLMN) and the resolution of the photo isnt good enough to read the PCB screen print.
Reference https://www.banggood.com/A4988-DRV8825- … rehouse=CN
Im wondering on your board what the 4th pin is for ?
The others are
E ( enable) (pin16 on raspi)
D ( direction ) (pin 15 on raspi)
S ( step) ( pin 22 on raspi)
AS for the step stick module, it can be A4988 or DRV8825 but not both !? it is very important which you have because of the orientation when you plug them in is different. Be careful
#14 Re: Help and Support » Pi3 Direct Drive Wiring Help » 2017-11-06 08:22:38
send me a link to the banggood stepper driver board pls and ill see if i can help out
#15 Re: Help and Support » NanoDLP Duplicator 7 -- Not Detected? » 2017-11-02 02:26:16
Your best bet is probably to find somebody who has a D7 ( i don't) and more importantly using the same firmware as you and ask them to share a resin profile with you. This will contain the previously mentioned before and after layer Gcode. Then just edit that to suit the resin you plan to use.
#16 Re: Help and Support » NanoDLP Duplicator 7 -- Not Detected? » 2017-11-01 06:18:15
Often if it appears to work but not actually print it has to do with the resin profile and specifically in the gcode Before layer and gcode after layer sections
#17 Re: Help and Support » Printer stopped showing up on the nanodlp dashboard » 2017-10-23 06:48:52
Check your router to see what IP address has been assigned to Nano DLP. Under DHCP it may have been assigned a different IP address than your previous sessions. Most routers will allow you to reserve a specific IP address for a device by using its IMAC number
#18 Re: Help and Support » Z-Endstop Position in NanoDLP configurable? » 2017-10-23 01:20:04
Bottom limit switch control is under development. Scroll to the bottom of this page and you will see it listed under "high priority" https://www.nanodlp.com/
#19 Re: Help and Support » Z-Endstop Position in NanoDLP configurable? » 2017-10-22 20:03:42
To the best of my knowledge the end stop position ( max or min) are configured in the control board firmware Not in Nanodlp .... As are the steps per mm, homing direction etc etc
#20 Re: Help and Support » Initial Setup Issues » 2017-10-22 05:28:30
Hi It can be a frustrating experience depending on your setup.
The best advice i can give is to try your raspi with the "NOOBS" image so you can get a better feel and understanding of the Raspi and also confirm your screen is working
The one thing i always do at initial set up with NanoDLP is set it up with an ethernet cable attached to start with Then when that's all working correctly you can configure WIFI in nano DLP.
I'm not saying that's the only way or necessarily the best way but it has worked for me on a couple of occasions.
The screen resolution and orientation can be tricky as there isn't 1 fixed method to get this to work.
At boot up you should see the standard "linux" boot text scroll by and when NanoDLP is loaded the screen will indeed go blank ( waiting to project the first sliced image)
If you haven't already take a look at https://www.youtube.com/watch?v=oz3K8ECEOf4
Also, search for NanoDLP in youtube. While a lot of videos aren't specifically for your issues i found them quite informative to the whole install and set up procedure
Good luck
#21 Re: Help and Support » Raspberry Pi + Arduino + Easydriver » 2017-09-16 15:01:22
You should be able to just drive the Easy driver from the Raspi3 ( 3 signals>> enable / step/ direction )
The easy driver will need its own power source and be sure to link the GND of the raspi to the GND of the easydriver power source
#22 Re: Help and Support » Where are "Before Each Layer" and "After Each Layer"? » 2017-09-16 01:50:57
They can both be found in "resin profiles".
#23 Re: Help and Support » Is there a menu or function like this.. » 2017-08-18 04:18:42
In theory and based on the fact that a lot of SLA / DLP printers use FDM control boards, Configure the firmware and make a thermostat that then connects to the "filament out" sensor on the control board. Just an idea
#24 Re: Help and Support » how to make nanodlp sd card image? » 2017-08-09 14:39:51
you can use Windisk32 to make an image
#25 Re: Help and Support » Layer 1 not showing » 2017-08-09 11:49:12
Are you sure your model is oriented at Z zero ??