centering a servo
Centering all 9G SERVO motors is critical before every ALLBOT build. This procedure ensures that the rotating shaft of the 9G servo is at it’s center so you can use it in your robot and know that anything you mount to it will have a predictable movement. There are only 3 easy steps needed to […]
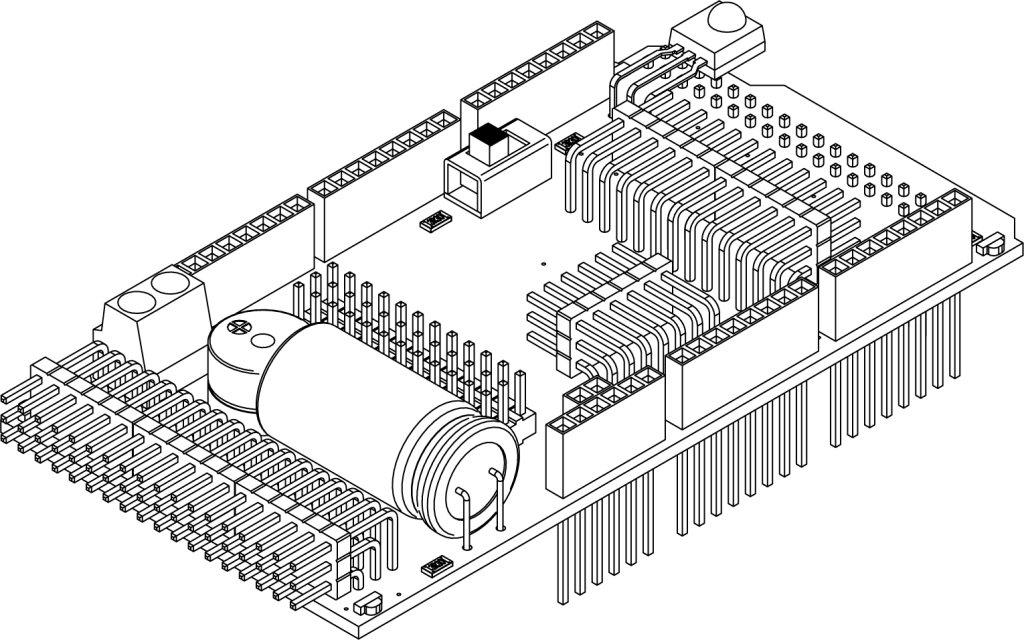
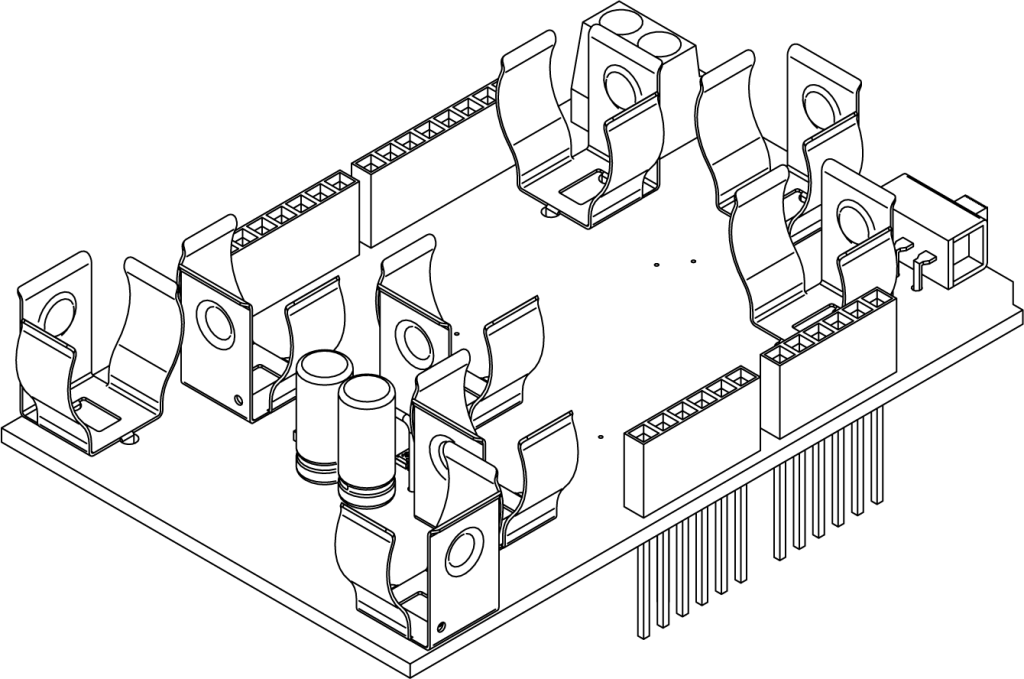
VRSSM shield
The VRSSM SHIELD allows you to connect 12 9G SERVO motors when the shield is plugged into an ARDUINO UNO and 36 9G SERVO motors when plugged into an ARDUINO MEGA. Instead of 9G SERVOmotors you can also connect sensors or other actuators. The VRSSM SHIELD can also receive an IR signal from the VR001 […]
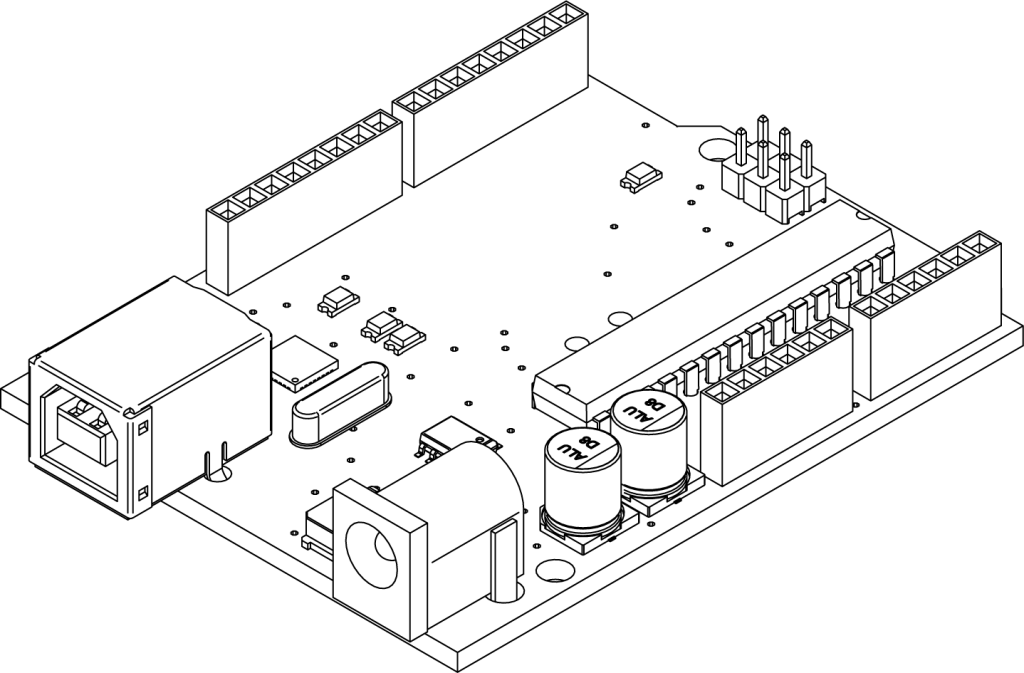
VRBS1 shield
The VRBS1 SHIELD is able to power the ALLBOTs by means of 4 AA batteries. There are a few points you need to be aware of when using this shield. What batteries should i use? How to insert in the AA batteries What voltages does the VRBS1 SHIELD produce? Using the VRBS1 SHIELD with ARDUINO […]
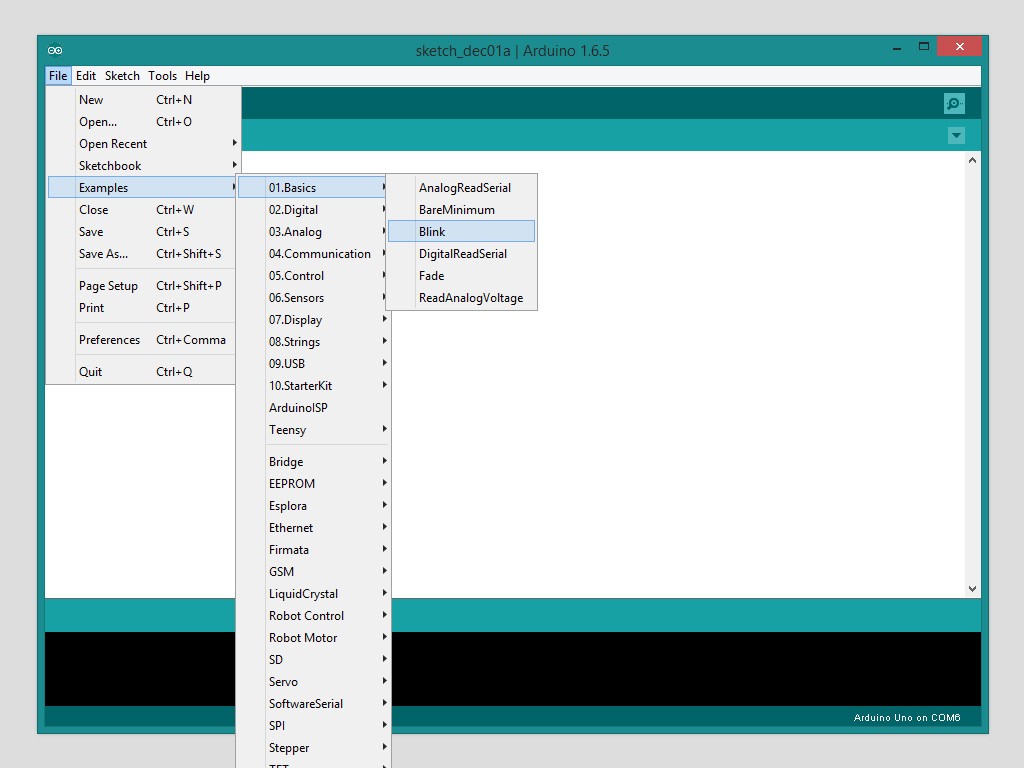
understanding the firmware
This is probably the most important part of the ALLBOT manual, here we explain how a regular ARDUINO SKETCH for any ALLBOT might look. This chapter will be divided up into several sections: Installing the ARDUINO IDE Connecting your ARDUINO Testing your ARDUINO Explaining the ALLBOT LIBRARY Letting your ALLBOT chirp Creating a movement routine […]