Después del último proyecto de B-ROBOT, esto es en lo que he estado entretenido los últimos meses...
Todo surgió a raíz de la construcción de mi impresora 3D. Por un lado, la posibilidad de diseñar y fabricar mis propias piezas y por otro lado, la idea de ¿cómo aprovechar los materiales y los conocimientos en la construcción de la impresora 3D para hacer otra cosa? Es decir, ¿como podría hackear los componentes de una impresora 3D para convertirla en algo distinto?
Había visto varios proyectos muy interesantes de robots para pintar, para fabricar PCBs etc... pero buscaba algo distinto.
A esto se unió la afición que mi hija tiene por las máquinas de Air Hockey (y la mía por la robótica) y así un día surgió la idea: Y si.... Mmmmm....Parecía bastante complicado y con muchas incógnitas (detección del disco??, velocidad de movimiento??), pero eso es lo divertido no?

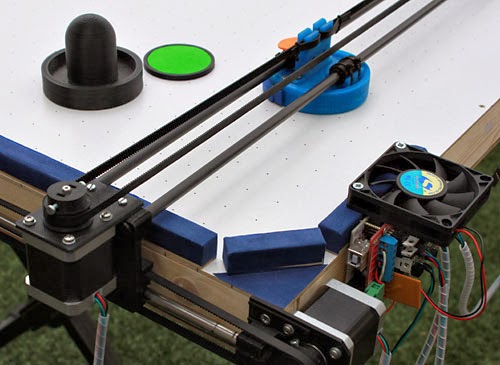
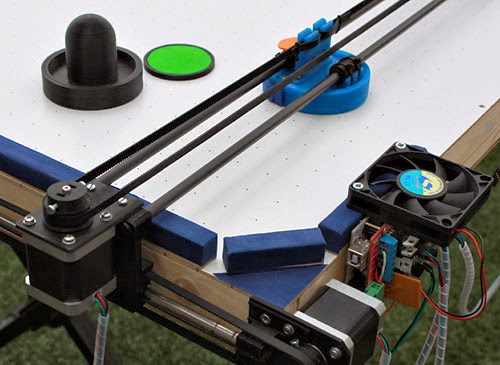
Tomando como base las piezas de una impresora 3D RepRap típica, es decir, motores NEMA17, drivers, Arduino Mega, RAMPS, correas, rodamientos, varillas, piezas impresas... comenzamos a darle forma al proyecto. La gran ventaja de usar estas piezas es que son baratas y fáciles de conseguir.
Primero comencé con la construcción de la mesa. Pensé en un tamaño medio (mi casa es pequeña, jeje) pero que fuera suficiente para jugar. Por otro lado tomé las medidas del maletero del coche (quería que el proyecto fuera transportable) y así elegí las dimensiones finales de 100x60cm.
Compré los tableros y los listones de madera y me puse a montar el bastidor. Primero estaba huyendo de hacerlo con aire y simplemente buscar alguna superficie que deslizara bastante y llegué a montar una mesa de esta forma y se podía jugar, pero la verdad es que perdía bastante gracia, asi que me decidí a hacer una mesa con aire. Tenía muchas incognitas, asi que probé distintas posibilidades hasta que dí con una combinación muy sencilla con 2 ventiladores viejos de PC que funciona muy bien. Por otro lado agujerear la mesa parecía que iba a ser un trabajo enorme pero en realidad, usando una guía para los agujeros, salió bastante fácil.
Pues bien, ya tenía una mesa de Air Hockey totalmente operativa!! y un par de horitas de juego que le echamos ;-)
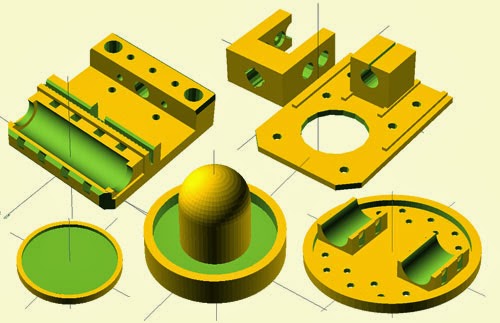
Mientras tanto fui diseñando las piezas del robot. Barajé dos diseños, uno H-Bot y otro el actual. Finalmente me decidí por el actual diseño con 3 motores (2 para el eje Y y uno para el X). Tras varias iteraciones de diseño de las piezas, y algunos cambios de materiales para reducir al máximo los pesos y las inercias (y así incrementar las aceleraciones) llegamos a un diseño bastante operativo. Una de las sustituciones mas importantes es la sustitución de las varillas del eje X por tubos de carbono de cometas que funcionan perfectamente con rodamientos impresos en PLA y ahorran muchísimo peso.
La parte del código comenzó estudiando el código del Marlin (software típico de las RepRap) pero finalmente decidí no reaprovecharlo por varias razones, primero porque toda la parte de GCODE no era necesaria, y segundo porque los software de las impresoras 3D tienen una parte muy importante de planificación de movimientos que no es la forma en que debe de funcionar el robot de Air Hockey. Las impresoras 3D planifican los movimientos para obtener recorridos suaves pasando por todos los puntos. En el caso del robot de Air Hockey cada nuevo comando que le enviemos debería generar una respuesta inmediata, anulando al anterior, porque lo que prima es que el robot se mueva lo más rápidamente posible a la nueva posición que le hemos indicado.
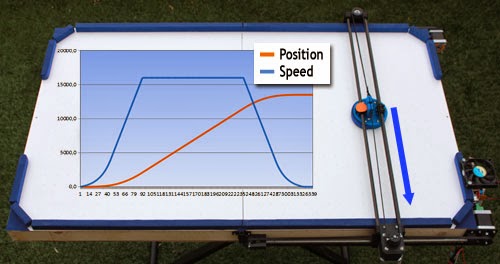
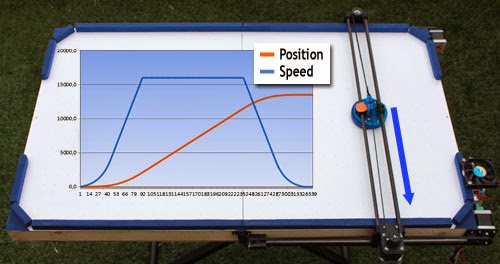
De esta forma decidí comenzar el código totalmente desde 0, empezando por implementar el driver para los motores Steppers usando las interrupciones del Arduino y haciendo el código lo más eficiente posible. He implementado un control de posición, velocidad y aceleración, usando una rampa de aceleración con un perfil S-profile en el arranque para hacer los movimientos un poco mas suaves.
El control de velocidad permite generar pulsos hasta 25Khz que es la máxima velocidad que he conseguido con los steppers. El control de posición funciona a 1Khz.
Una vez que el robot estaba montado, comenzaron las pruebas e incluso hice una interfaz para controlarlo manualmente desde el móvil por Wifi.
Para la detección del disco pensé algunas posibilidades pero finalmente decidí usar un sistema de visión.
Inicialmente pensaba usar el sensor CMUCAM5 (Pixy) que encajaba muy bien con este proyecto (y en futuro prepararé una versión para este sensor), pero lo cierto es que los retrasos han hecho que la cámara todavía no este disponible, así que improvisé un plan B: Usar la cámara de la PS3 EYE junto con un PC para desarrollar el sistema de visión. El sistema de visión lo he desarrollado en C usando las librerías de OpenCV para la captura, umbralizado, filtrado y segmentación.
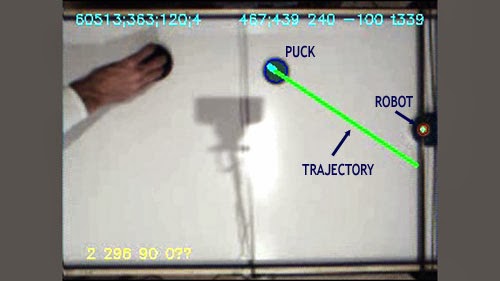
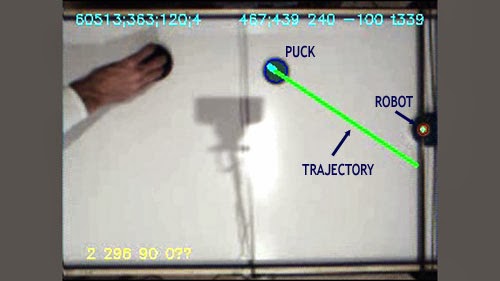
El sistema detecta el disco de hockey que debe de tener un color diferenciado y el resultado se envia por un puerto serie al Arduino. El sistema de visión envía paquetes de información que contienen la posición del disco y del robot en píxels dentro de la imagen. La cámara esta funcionando a 60Hz y con una resolución de 320x240. Afortunadamente la cámara tiene muy poca distorsión y no he tenido que realizar correcciones de distorsión de la lente. A su vez se graba un vídeo en el PC con lo que se está capturando, lo cual es muy útil para depurar.
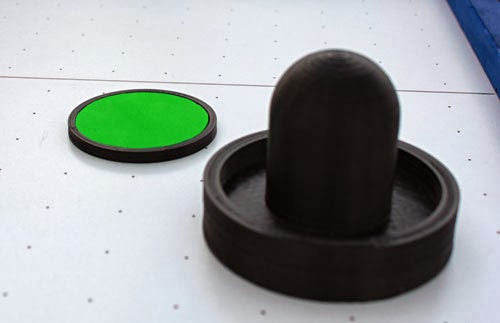
Uno de los principales problemas que he tenido es que los motores NEMA17 están bastante justos de potencia para este proyecto y el inconveniente de usar motores paso a paso es que si perdemos pasos (que puede pasar fácilmente, por ejemplo al tropezar el robot con el disco en una pared) no nos damos cuenta y perdemos por completo el posicionamiento del robot. Para solucionar esto, lo que he hecho es aprovechar el sistema de visión para detectar también el robot (con otro color distinto) y así poder detectar cuando el robot ha perdido pasos y solucionarlo.
Con todo esto, lo que restaba era la implementación (dentro del Arduino) del sistema de predicción de trayectorias y del sistema de estrategia del propio robot. Una vez que tenemos detectado el disco en dos fotogramas consecutivos podemos calcular la trayectoria que va a seguir (ecuación de la recta que pasa por dos puntos, esto son matemáticas del colegio eh!!). También podemos calcular si la trayectoria va a tener rebote con las paredes laterales y su nueva trayectoria. Todos estos cálculos de trayectoria se le pasan al sistema de estrategia que decide qué es lo que va a hacer el robot: Defender, Defender y atacar a la vez o preparar un nuevo ataque.
Una parte bonita de este proyecto es que el subsistema de estrategia esta totalmente aislado y es muy fácil que cualquiera pueda en el Arduino modificar la estrategia y programar su propio código aislándose de las complejidades del control de los motores, del sistema de visión y de la predicción de trayectorias. Al final la estrategia es lo que hace que el robot gane o pierda!! así que se plantean posibles competiciones de robots de Air Hockey ??
A pesar de que pueda parecer complejo, es un proyecto reproducible, con materiales asequibles y totalmente abierto:
- Repositorio de código, diseños 3D, documentación: GitHub
- Manual de construcción (disponible también en inglés): Manual
Algunas otras consideraciones que se han tenido durante el proyecto (y para el futuro):
- Reproducible: Facilidad para conseguir los materiales, documentación, código y hardware abiertos...
- Transportable: El robot se desmonta completamente solamente con 6 tornillos. Así que se puede desmontar para jugar o transportar.
- Adaptable: Es muy fácil adaptar el nivel de juego del robot, por ejemplo para jugar con niños, simplemente bajando la aceleración y velocidad máxima del robot (esto se podria mejorar en un futuro o incluso que fuera dinámico)
- Actualmente el robot no detecta los goles pero se podría plantear algún sensor para ello (futuro).
- En un futuro el robot podrá autocalibrar la cámara usando unos movimientos predefinidos al inicio (evitaría la calibración de la cámara).
- Competiciones: La mesa permite colocar 2 robots, uno a cada lado. Competiciones entre robots ???? Al final cada uno podría tener su código con la estrategia y comparar distintas estrategias en un torneo...
- Ciencia: Es un proyecto estupendo y entretenido para enseñar ciencia y en especial a los niños:
- Conceptos de física: Rozamiento, movimiento continuo y uniforme, rebotes, conceptos de posición, velocidad y aceleración
- Conceptos matemáticos : Ecuación de la recta que pasa por dos puntos, predicción, Sistema cartesiano XY
- Robótica: Motores, Sistemas de visión, Control, Arduino.
- Filosofia DIY : Construye tu propia mesa de Air Hockey!
- Hacking : Usar las piezas de una impresora 3D para construir algo totalmente diferente.
¿Cuál es el nivel de juego actual del robot? Pues bien, actualmente el robot le gana fácilmente a un niño. Un adulto con cierta experiencia (yo mismo jeje) todavía le puede ganar al robot, pero seguramente con algunas pequeñas mejoras más va a estar realmente difícil ganarle...
El proyecto esta totalmente vivo y en fase de mejoras, tanto en el código como en el robot... cualquier aportación al proyecto será bienvenida...
Science&fun
Jose Julio (@jjdrones).