En varias ocasiones me han preguntado información sobre quadcopters y los proyectos en los que estoy trabajando, asi que he decidido crear este post (gracias nacho por la idea) como introducción al mundo de los quadcopters...

La página (red social de UAVs) en la que suelo postear los proyectos es http://diydrones.com. Mi perfil dentro de diydrones es jose julio
El proyecto de Multicopters de diydrones se llama Arducopter : Página principal y toda la documentación (wiki): http://code.google.com/p/arducopter/

En cuanto al frame pequeño para vuelo indoor, proviene de este proyecto:
http://diydrones.com/profiles/blogs/indoor-fun-with-a-tiny
En este post hay un link a un documento en google docs con las instrucciones para construir el frame, que usa basicamente varillas y conectores de cometas (se pueden conseguir en decathlon)
Recientemente le he hecho algunas modificaciones que no están en este documento. Basicamente ahora uso estas hélices: http://www.hobbyking.com/hobbyking/store/__22753__5030_Propellers_Black_3xCW_and_3xCCW_6pcs_per_bag.html que ya no necesitan inclinar los motores y ahora uso una bateria 2S800.
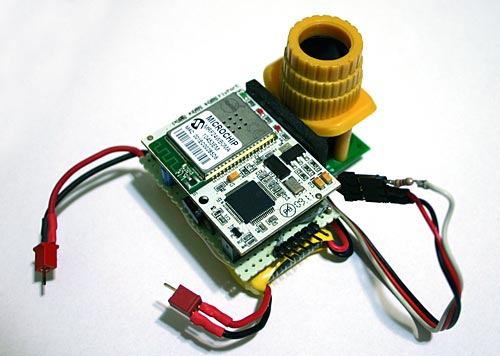
En cuanto a la electronica lo que estoy usando últimamente es el Ardupilot Mega 2.0 (https://store.diydrones.com/APM_2_0_Kit_p/br-ardupilotmega-03.htm) Si solo lo quieres para indoor se puede comprar sin GPS. Esta electrónica no es barata pero hay que tener en cuenta que sirve para construir un sistema UAV completo. De hecho ahora mismo dentro de los proyectos de Diydrones se puede construir un piloto automático para aviones, multicopters, barcos y coches (proyectos ArduPilot, ArduCopter, ArduBoat y ArduRover).
En cualquier caso también nombrar que hay otros proyectos opensource de quadcopters, lógicamente yo nombro primero en el que estoy metido ;-), algunos conocidos:
http://aeroquad.com/ (conozco al desarrollador de este proyecto porque estuvo un tiempo metido en arducopter)
http://www.multiwii.com/ (proyecto basado originalmente en los sensores de la wii)
http://www.openpilot.org/
En cuanto a equipamiento de radio control el mejor sitio para pedir y más barato es : http://www.hobbyking.com
Aqui tienes un apartado de multi-rotores donde conseguir incluso frames, quadcopters ready to fly, helices, motores, emisoras...
En concreto tiene algun pequeño frame para vuelo indoor que tiene buena pinta y una electronica muy básica pero muy barata (todo esto en la sección multi-rotores)
Si alquien quiere mas información que me lo comente...