The robots are built, but due to a bug in the communication code, they didn't walk "straight out of the box". The bug makes them wait for a connection before they start walking, and I will be fixing this soon, and I will provide new firmware to flash soon.
In the mean time, you can play with your robots by using a serial connection. In fact, you will have access to the Python console on them. All you need is a 3.3V USB2TTL converter (I gave out a couple at the workshop, it's that red thing with USB plug on it). If you don't have one, I highly recommend you get it anyways, because they are extremely useful in debugging all sorts of projects anyways, and you will also need to to flash the new firmware, both for the Arduino and the ESP8266 parts of the robot.
Connecting
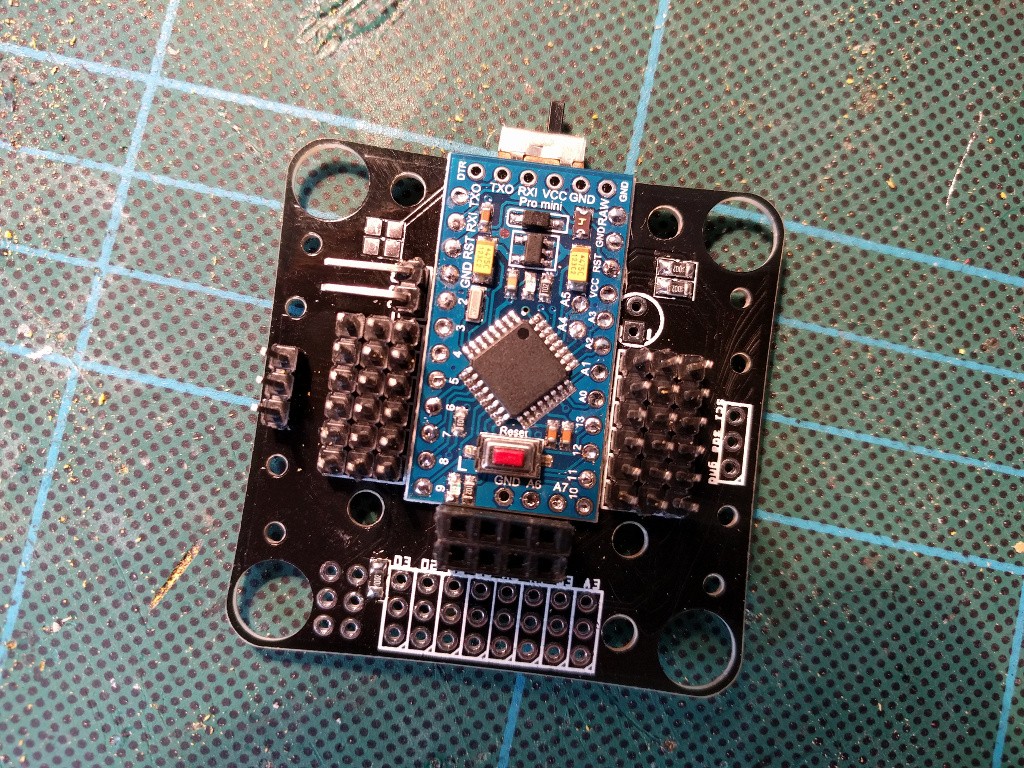
To connect the serial interface of the ESP8266 on your robot to your computer, you will need to use the three pins on the left side of the robots. If you look at the bottom side of the board, you will see they are labeled, from front to back, "gnd", "tx" and "rx". Use three female-female dupont cables, and connect the "gnd" pin on the robot with the "gnd" pin on the USB2TTL, the "rx" pin of the robot with the "tx" pin on the USB2TTL, and the "tx" pin on the robot with the "rx" pin on the USB2TTL.
Next, plug the USB2TTL into your computer (or even better, a USB hub connected to your computer), and open a serial terminal with speed 115200 on the serial port that appears. On Linux, I use the screen program for that, with the command:
$ screen /dev/ttyUSB0 115200
On Windows you can use PuTTY for that (you might need to have the drivers for the USB2TTL installed first). I have no idea how to do that on macs, but there must be some way. Once you do that, you should see black screen... Then switch on the robot, and you should see something like this:
rll��|�l�|�l�b|����r�b�b��nn�lnn���bplblrlp�n��lbn�|쌌��b��nn�l��l`�nnl`nr���nr�`p�n�r�����bn�|lb��nn�l`�nnl`nr���nrrl`p�n�r�����쌜bn�|쌎b��nn�l`�nnl`nr���nl`r��nl`�l��|��rrnb��l��b�lb쌜���l��b�lrldon't use rtc mem data
ll��|��rrnb��ll�p�b�b쌜���l��b��lrl�l��|��rrnb��ll�|�b�b쌜����b�lblrl��rl���bl�br|�bll���lb��n�nn��l�|�l�l��l������l`�n��
That's the booting messages of the ESP8266 received at a wrong baud rate. Don't worry about that. Now, if you press Ctrl+C, the program that is executing on the robot will be interrupted, and you will see this:
MicroPython v1.6-374-g2c407bc-dirty on 2016-04-07; ESP module with ESP8266
Type "help()" for more information.
>>>
That's the Python console prompt, also known as the REPL console. You can type Python code in there, and it will get executed on the robot.
Walking
So how do you make it walk? Type in this code:
from robot import Robot
from gait import Creep
robot = Robot()
gait = Creep(robot)
for frame in gait.run():
pass
That should get the robot creeping forward. To change the directions you can set the
dx,
dy and
rotation attributes on the
gait object, and repeat...
Read more »
 Radomir Dopieralski
Radomir Dopieralski










Can someone tell me what is the name (if there is any) of the connector that is on the battery? Thanks - EDIT - found it... JST if someone else is wondering also... It is written on the connector :)