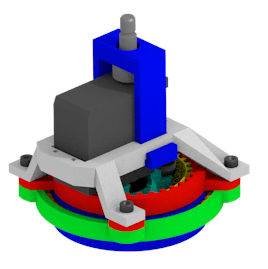
This is a 3D printable version of a harmonic drive. Harmonic drives are mechanical gear systems that have some very nice properties such as no backlash and high gear ratios :Harmonic drives are used on a lot of the high end humanoid robots such as Asimo. Unfortunately they are normally really expensive (thousands of dollars), so I'm hoping to make this technology accessible to the hobby market. This design costs around $4 in parts and plastic (+ $11 for the servo) and can be controlled from any standard microcontroller (+ $25 Arduino Uno). Once the design has been refined a bit I want to use them in future bipedal robot prototypes.The main technical addition to the basic harmonic drive design is the stabilizer which attaches to both the flex spline and the circular spline to constrain the output force to the radial axis. This reduces sheering forces on the flex spline that would otherwise destroy it quickly. Around 25 iterations of the flex spline design have been evaluated and the current version has stood up to about 3 hours of use without breaking. Some tweaking of the printer settings might make the flex spline more durable. We need your help to make this design better so that everyone can have access to this great technology!
- 16 to 1 gear ratio
- no backlash
- holds position without power
- inexpensive


3. Assemble the drive:
Harmonic Drive InstructionsHarmonic Drive Instructions
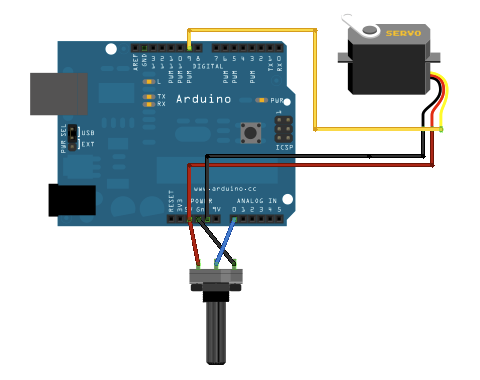
4. Hook up a microcontroller to test it out. Follow the Arduino Servo Knob tutorial (thanks guys). Note that the potentiometer here isn't the potentiometer on the harmonic drive. The potentiometer on the harmonic drive can be used to sense the rotational position of the drive when it is connected to a joint.

Model Files | 
|
|
|

Photos Video
| 
| Microcontroller | Arduino Uno | | Actuation | 1 DOF ( 55g servo) | | Sensors | rotational position sensor | Cost
| $15* : $14 parts + $1 consumables | Plastic
| 50cc | Build Time
| 3 hours : 2.5 hours printing + 0.5 hours assembly
| Size
| 7.5cm x 7.5cm x 8.25cm ( 3" x 3" x 3.25") |
*excludes shipping costs
|
|