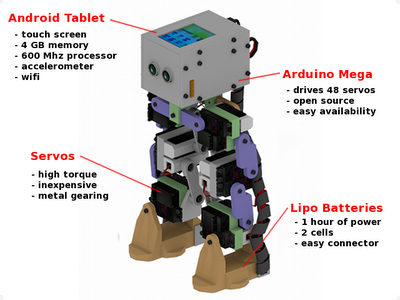
ROFI is the fifth prototype from Project Biped. It is a self-contained, bipedal robot that uses accelerometer feedback to balance. It has 12 DOF (degrees of freedom) and can walk around while avoiding obstacles using an ultrasonic range sensor. A small Android tablet in ROFI's head provides the brains and an Arduino Mega provides the hardware interface. All of the designs, instructions, source code, and parts lists are provided for free . ROFI was designed to be easily made by anyone with a low cost 3D printer and an interest in learning about robotics. Check out the FAQ if you have any questions.
|
| Computer |
Archos 28, Android Tablet
|
| Microcontroller |
Arduino Mega |
| Actuation |
12 DOF ( 55g servos) |
| Sensors |
Ultrasonic Range Sensor, 3 Axis Accelerometer
|
Parts Cost
|
$350 (excluding shipping)
|
Plastic
|
227g (about a 4th of a spool)
|
Build Time
|
30 hours : 25 hours printing + 5 hours assembly
|
Size
|
17.75cm x 11.45cm x 30.5cm ( 7" x 4.5" x 12") |
Robot Poser  Connections
|
|
Updates
-
Robot Poser Beta Posted
Robot Poser is a Windows desktop application that allows new action sequences and servo calibrations to be created for ROFI. The application controls the robot via a USB cable from ...
Posted Jan 1, 2013, 9:00 PM by Jonathan Dowdall
-
Software Posted
All of the software that goes on the robot (both Android and Arduino) has been posted! A new version of the Robot Poser is being tested right now and will ...
Posted Dec 5, 2012, 9:47 AM by Jonathan Dowdall
-
Mini ROFI Model
Made a 1/3 scale model of ROFI. It has all of the same parts
as ROFI, but the electronics and servos are all printed (i.e. the robot
isn ...
Posted Nov 27, 2012, 6:01 PM by Jonathan Dowdall
|
|