검색결과 리스트
글
자이로 센서와 가속도 센서를 융합하여 물체의 각도를 측정하는 상보필터를 공부한지도 꽤 되었고, 이런 상보필터를 실제 모바일 로봇인 밸런싱로봇[관련글]에도 이미 적용한 것을 소개했었습니다. 그리고, 예전에 제 블로그를 방문해주셨던 분의 소개로 1차 상보필터[관련글]도 역시 보여드렸는데요. 이번엔 간단히 1차 상보필터에서 나타나는 뭔가 이상한 현상을 말씀드릴려고 합니다. 분석? 이유? 뭐 이런거 없이 ^^ 그냥 보여만 드릴려구요.. 왜냐면.. 잘 모르겠거든요...ㅠㅠ
하여간...
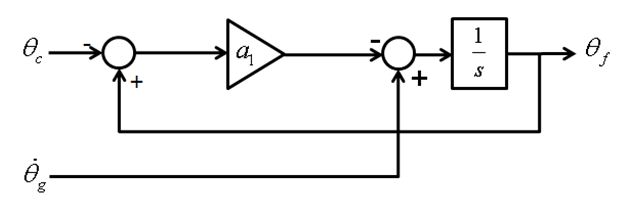
이것이 1차 상보필터의 블럭선도입니다. 1차 스럽게.. 미지수도 하나죠...
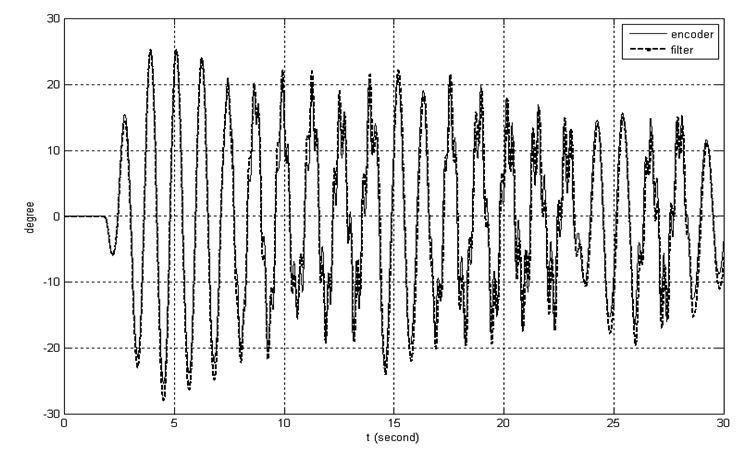
이것을 적용했을때, 실선인 참값과 별이상이 없다는 것을 확인할 수 있습니다. 깔끔하기도 하구요. 실제로 1차 상보필터로 회전형역진자 시스템을 제어해봐도 뭐.. 별 어려움없이 잘 됩니다.
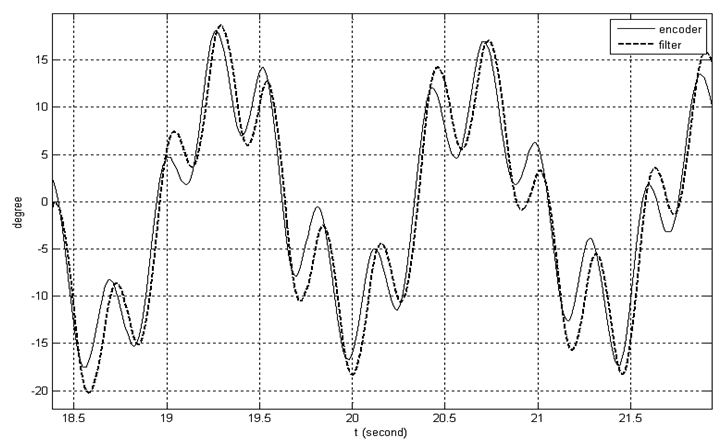
위 그래프중 일부를 확대한 것입니다.
그런데...
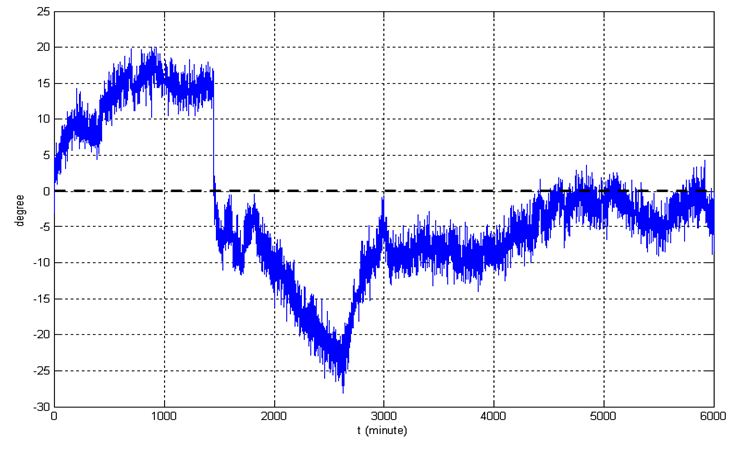
센서를 바닥에 가만히 놔두고 4일이상, 6000분을 테스트했습니다. 제가 소개해드렸던 2차 상보필터[관련글]에서는 이런일이 없는데, 1차에서는 위 그림처럼 20도가량을 움직입니다. 아... x축이 '초'가 아니라 '분'입니다. 신기하게도 말이죠...ㅠㅠ 하여간 제가 블로그에서 소개한 적이 있는 1차 상보필터에 대해 뭔가 문제가 있군요... 음...ㅠㅠ 저만 그런걸까요?? ㅠㅠ
혹시.. 지나가다 이와 같은 현상에 대해 2차 상보필터에서는 잘 되는데, 1차에서는 안되는 이유를 아시는 분은 힌트 부탁드립니다.. 꾸벅..ㅠㅠ
| NT-ARSv1 (각도 측정, 자이로 센서 가속도 센서 이용, ARS, IMU) |
자이로 센서와 가속도 센서를 이용한 각도 측정의 어려움을 해결할 수 있는 ARS모듈로 낮은 가격과 작은 크기를 가지며, 금속 케이스가 있어 활용도가 높음. NT-ARSv1 : 관련페이지
'The Robot > HardwarePart' 카테고리의 다른 글
| DC 모터의 모션(서보)제어 (Servo Control - Motion Control) (60) | 2011/07/06 |
|---|---|
| 기울어진 각도 측정. 자이로 센서와 가속도 센서 (NT-ARSv1, ARS) (92) | 2011/04/21 |
| 드디어 공들인 제품이 나옵니다. G.INS - ARS (관성항법장치) (58) | 2011/04/08 |
| 1차 상보필터(complementary filter)의 한계 (6) | 2010/12/13 |
| 자이로센서와 가속도센서를 이용한 각도추정 1차필터 (52) | 2010/07/03 |
| 자이로와 가속도센서를 이용한 각도추정 필터를 C로 구현하기 (130) | 2010/02/10 |
| 최소자승법을 이용한 각도추정 보정필터의 설계 (62) | 2010/01/01 |
| 자이로센서의 보정용으로서 가속도센서와 기울기센서의 성능비교 (0) | 2009/08/02 |
설정
트랙백
http://pinkwink.kr/trackback/390


즐거운 한주 열심히 공부하면서...ㅋㅋ
앗.. 네.. 즐거운 한주가 비로 시작하네요..ㅎㅎ^^
편의상 dot(theta)=q 라고 할께요. 1차 보상 필터만을 사용하게 되면, theta = (1/s+a)q + (a/s+a)theta_c 가 되니까, 고주파의 노이즈를 잡아줄만한 하이패스 필터가 없어지는 것이죠. 그리고 비확정적인 자이로 혹은 가속도계의 오차를 적분하면 0이 되어야 하지만 그렇지 않기 때문에 나오는 개념이 ARW(angle random wark)등이 있는데요. 잘 아시겠지만 다른 분들을 위해 쉽게 말씀 드릴께요. 예를 들어 자이로를 한시간 적분하면 0 이 되어야 겠죠? bias 나 scale factor 보정을 했다고 가정했을때요. 그런게 그게 아니더라는 겁니다. 한시간 적분했을때 어느정도 발산 하는지를 나타내는 개념이 ARW (수식적으로 보면 좀 다르긴 합니다만...)인데요. 그것 때문에 저렇게 수렴하지 못하고 일정 범위내에서 드리프트 하는 경향을 보이게 됩니다. 명확한 설명이 못되서 죄송합니다.
노이즈를 잡아줄 하이패스. 라는건 약간 이상하지만, ARW라는건 처음 들어보네요^^ 워낙 각도추정을 국소부위로 공부하다보니...^^ 조금 있으면 제 블로그에 있는 내용으로 ARS장비를 시중에 출시할것 같습니다. ㅎㅎㅠㅠ 창피하지만 말이죠...^^
아 그리고 저렇게 보이는게.. ARW 만의 영향은 아니구 bias 드리프트 의 영향일수도 있구요. 뭐.. 핑윙님은 언제 꼭 한번 뵙고 싶어요 ^^
네.. 저도 만나뵙고 싶은 분들이 많지만, 최근 다리를 부러뜨려서..ㅠㅠ 초여름이 오기전까진 집-회사...만 다닌답니다. ㅠㅠ