You are not logged in.
- Topics: Active | Unanswered
#76 Re: Support Generator » NanoSlicer » 2017-03-03 00:43:55
Couple of initial comments
the pan and orbit ( via the mouse) act a bit strange and are a bit slow
if you accidnetally pan or orbit and touch the model then the model moves but there is no way to restore it to its original position
#77 Re: Help and Support » Fuse max Amp for 1206L? » 2017-02-15 17:13:55
As the 1206 is only supplying the Raspi ( at 5VDC) for logic 2.5 amps should be more than enough. Maybe increase to 3 if you're running a cooling fan or similar
Its also probably a good idea to join the ground line of the 12 volts supply to the ground line of the 5VDC / RP3 as well
#78 Re: Help and Support » noob---forgive me im 48 years old » 2017-02-03 01:45:54
Im a bit confused by your latest post ! " Does it matter if i have steppers instead of servo"
You only need 1 stepper and it is to drive the Z axis.
A servo can be used for the shutter and maybe a tilt/peel function if you have it.
If you are using a ramps board you should remove the stepper drivers from X ,Y E0 & E1 as they have no function Just leave Z ( of course)
If you want to test your ramps in stand alone mode you can upload the test firmware to see which axis are working and which not.
You can get the Ramps test firmware here http://reprap.org/wiki/File:RAMPS14_test.zip
WHen loaded it basically runs the stepper motors backwards and forwards and pulses the extruder heater and bed output without any input needed from the user.
Very useful as a quick way of seeing if your ramps board ( and stepper driver chips) are working ok
Good luck
#79 Re: Help and Support » Might be over with » 2017-02-02 02:45:45
Don't worry about it I often find myself screaming at the gods when getting things to work the way i want them. Added to which i was educated in engineering in the "If at first you don't succeed Get a bigger hammer" era
Youll get there if patient
Maybe go back and read this again https://www.nanodlp.com/download/
Its only 1 page but contains a lot of useful/critical info
Good luck
#80 Re: Help and Support » noob---forgive me im 48 years old » 2017-02-02 02:10:53
You are forgiven ....Im 57
And forgive me if im telling you something you already know !
The screen should go blank after NanoDLP installs . It is what is commonly known as a headless install = it does not support a screen attached for OS info ( of course it later drives the HDMI output to a DLP 3D printer) It is only accessible via a web browser.
To be honest i have never installed NanoDLP on a working Linux distro I always use the "pre installed" ISO I then hook up the Raspi to power and my network with a Cat5 cable Then I access my router to see which IP address the Raspi has been given ( assuming your router is using DHCP)
Then use that IP address in my browser to access NanoDLP
You need to allow enough time for it to install completely ...
Good luck
#81 Re: Help and Support » Might be over with » 2017-02-02 02:04:55
Have you loaded the patched version of Marlin on the ramps ?? (https://github.com/mUVe3D/Marlin-mUVe1DLP-Running)
#82 Re: Help and Support » Not being recognized » 2017-02-01 13:28:22
Basically the GRBL/ Nano is a basic ( and still very versatile) simple cheap CNC / Gcode solution
http://www.banggood.com/CNC-Shield-UNO- … mds=search
Really easy to set up and configure via terminal - It has end stop feed back and the ability to turn ON/OFF a couple of outputs ( tool and coolant if i recall correctly) that you can use for LED / shutters ect
I can see what you mean with a Ramps being over kill BUT it does every thing you need and by not using the heater elements even the clone ramps reliability improves a lot
#83 Re: Help and Support » Not being recognized » 2017-02-01 01:35:55
Thanks for your reply.....something I was doing loading the program onto the PI3 kept going wrong. I went to the Nanodlp site and copied the download to go directly into the PI via the terminal. It went in correctly and I am back in business. Now, I can get back to the 'headache' of figuring out how to get the z axis moving with only the PI and either an A4988 or a DRV8825. I have no idea why I want to do this at 66 years of age, but I do and I will.
Thanks for your response.
Good attitude !!!
The easiest ways are
Ramps 1.4 board
GRBL & Arduino Nano
Big easy driver
Make your own ( but make sure you have a good quality cap protecting the stepper motor VDC and make sure the Stepper GND & Raspi GND are tied together)
#84 Re: Help and Support » Not being recognized » 2017-02-01 00:38:29
The quickest way is to look at your modem/router/wifi access point and see if the Raspi3 is connected and if so which IP address it has been assigned.
To see if the Raspi is working just connect it directly with a Cat 5 cable
Good luck
#85 Re: Help and Support » Hello all!!! » 2017-01-30 02:09:24
Hi
You may also want to consider the following. Not only do you need to control a stepper driver but also the Z home position end stop ( micro switch) and shutter / LED on-off. In consideration of these 3 functions it makes good economic sense to use a simple FDM control board like a ramps 1.4 that communicates over a serial link with the RasPi. Gcode commands are supported in NanoDLP so controlling your machine is quite straightforward. Added to which you have easy access to micro stepping etc.
With a clone Ramps1.4 & Mega combo costing around 10USD i cant see you being able to find a more cost effective solution.
IF you really want to do direct control take a look at https://www.nanodlp.com/download/ ( scroll down to about half way ! )
This even gives a PCB design layout
Good luck
#86 Re: Help and Support » I want to operate KLD-LCD 1260 » 2016-12-28 08:33:59
Thank you for your polite answer
You are welcome. If you can be patient i will help you when i have had time to get this working on my machine
#87 Re: Help and Support » I want to operate KLD-LCD 1260 » 2016-12-28 03:43:06
I think you need to do some research before trying things out
Unfortunately i haven't had time to try my KLD 1260 with NanoDLP yet.
So this is the control board the machine uses ( at least its the one my machine has)
http://reprap.org/wiki/MKS_BASE
And from that page we can see it uses 16 microsteps so you can fill in that section of the Nanodlp settings
It uses basic sprinter firmware
and we know from the machine it has a lead screw pitch of 2mm
To operate the UVLED
Shutter open Gcode is M106
Shutter close Gcode is M107
#88 Re: Help and Support » I want to operate KLD-LCD 1260 » 2016-12-25 04:00:23
Hi You don't need to do either A or B You can simply use the Raspi HDMI to the Screen and a Raspi usb port to the KLD 1260 controller board serial connection.
Leave the original KLD 1260 controller in place ( MKS 1.1 pcb) so it can drive 1/ the stepper motor 2 / Drive the LED power ON / OFF & 3/ Managed the Z ( home position) end stop.
NanoDLP works fine controlling these 3 functions via serial communications
WHat you do have to do is configure the Raspi to output the correct resolution on its HDMI port and that is what is being discussed on the forum thread >> https://www.nanodlp.com/forum/viewtopic.php?id=305
#89 Re: Help and Support » nanoDLP for Proniks KLD-LCD1260 (1440x2560 LCD, Sprinter firmware) » 2016-12-18 18:36:25
Thanks Oliveenchine
Ill post back when i get chance to try it out
#90 Re: Help and Support » nanoDLP for Proniks KLD-LCD1260 (1440x2560 LCD, Sprinter firmware) » 2016-12-18 05:28:59
Yes got it working , just don't rotate the display and set nanodlp to 1440x2560
also, I was not able to get it working using hdmi_cvt , I had to figure out the hdmi_timings instead . there's a useful tool called " Custom Resolution Utility " that will give you all the useful informations you need ..
I actually got 2 similar boards/display sets ,and timings informations are different on each ...
Could you please post a link to the utility and maybe post your config.txt files.
I will be attempting this next week and it would be great to see how you managed success
Thanks
#91 Re: Help and Support » What does it mean? » 2016-12-15 15:36:51
ETA = estimated time of arrival ( in our case arrival means "print finish")
#92 Re: Help and Support » nanoDLP for Proniks KLD-LCD1260 (1440x2560 LCD, Sprinter firmware) » 2016-12-10 14:19:37
Thanks for posting .Great timing and you have saved me a ton of time by posting the HDMI config
Really interested to hear how things develop getting this all working
Cheers
Phil
#93 Re: Help and Support » Communication to ramps » 2016-11-28 18:13:27
No it is same. I guess it is wrong address or it has an issue.
Well i reinstalled everything from scratch and its working now . Thanks for your patience and support.
Looking back i think i may have typed the letter cap "O" instead of the number "0" in /dev/ttyUSB0
#94 Re: Help and Support » Communication to ramps » 2016-11-28 10:30:24
Thanks again for the reply
CLearly i need to do some more research on this . Ill report back when i know more
Cheers
#95 Re: Help and Support » Communication to ramps » 2016-11-28 02:56:46
Are you sure the serial port address is correct?
Thanks for the reply
Is that different to the path ? im not very conversant with Linux / Raspi
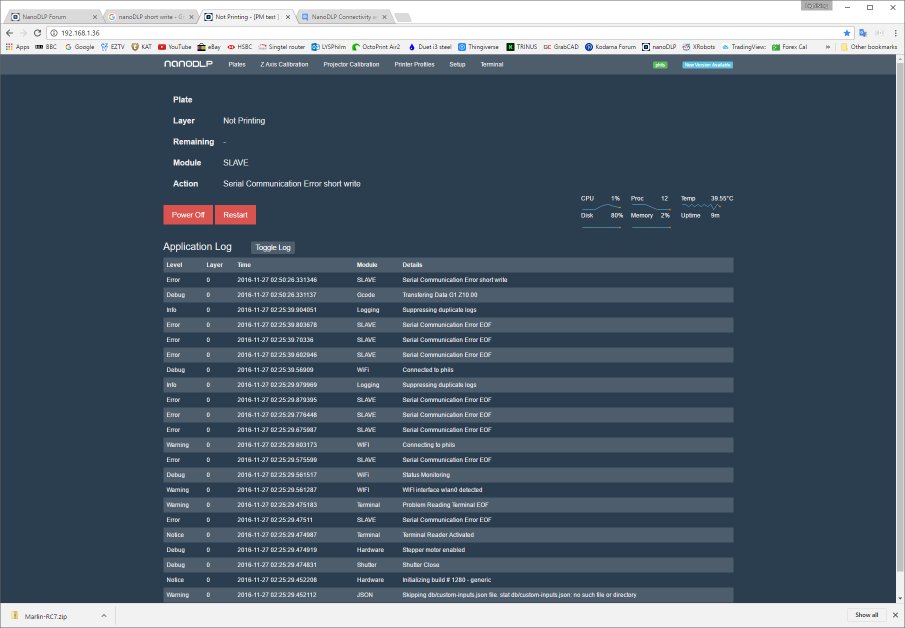
#96 Help and Support » Communication to ramps » 2016-11-27 03:11:04
- bigfilsing
- Replies: 5
Hi guys
Apologies if this has been covered before Ive been readign for 2 hours and havent found a similar issue.
So i have a RPI3 and a ramps 1.4 board with just a single stepper driver on the Z axis with a stock 1.8 deg 1.25amp stepper motor,
Ive tested the ramps with the standard test sketch as well as stock Marlin and used pronterface to control.All works fine
SO then i connected to the RPI3
Couldnt get it to work so used SSH to check the /dev path and corrected that in my path set up . That cleared the serial connection issue.
But now im getting 'Serial communication Error short write" and have no idea what this means.
All help appreciated Thanks
#97 Re: Help and Support » DSI Display » 2016-11-21 15:27:22
Hi guys
Id be extremely interested to know how you achieved this too ??
Cheers