Se trata de un robot tipo SegWay con solo dos ruedas, que tiene que mantener el equilibrio y que se puede controlar desde un Smartphone/tablet via Wifi. También funciona en modo autónomo con un sonar para detectar obstáculos y alguna que otra sorpresa que se puede ver en el vídeo...
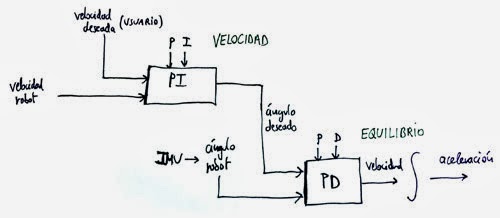
La verdad es que después de "pelearme" un poco con los algoritmos de control ha quedado muy suave y controlable. Inicialmente empecé probando un típico control PID que recibía como entrada el ángulo del robot (calculado con la IMU) y como salida controlaba la velocidad de los motores. El resultado no era muy bueno y sólo conseguía corregir bien en la zona cerca del equilibrio (0 grados) donde el problema parece ser más lineal. La verdadera mejora vino cuando cambié el algoritmo y probé un control PD donde la salida es la aceleración de los motores. Esto sí que permite controlar el balanceo del péndulo inverso y de hecho tiene lógica desde el punto de vista físico del sistema. El problema está en que de esta forma el robot no tiene la "obligación" de quedarse quieto, al fin y al cabo una aceleración 0 no implica velocidad 0, así que añadí un segundo control (control en cascada) PI de velocidad que gobierna al control PD interno de aceleración. Visto esquemáticamente:
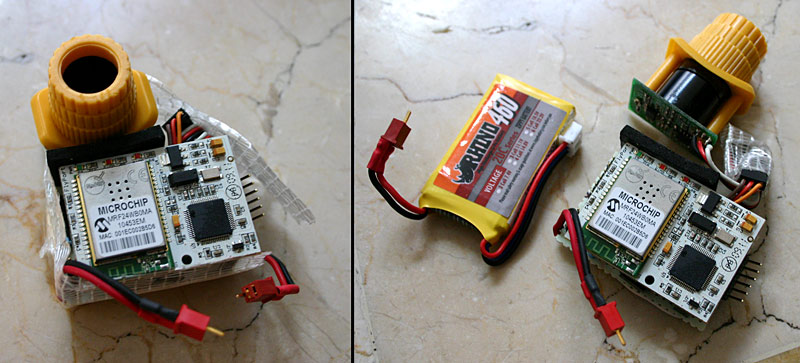
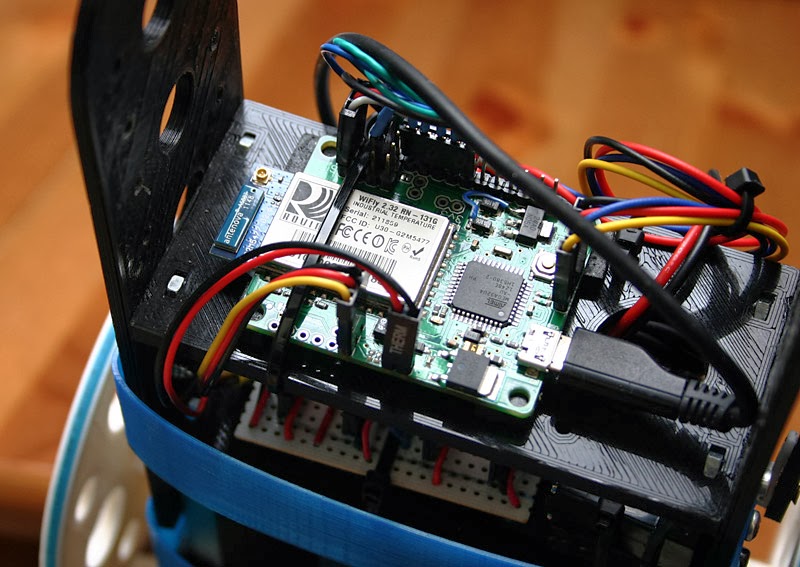
La placa principal (WITA) es un diseño que realicé junto con Jordi Muñoz (de 3DRobotics) y se trata de un Arduino Leonardo con un módulo Wifi integrado (RN131 o RN171). Esta placa permite diseñar fácilmente proyectos que se controlan desde dispositivos remotos via Wifi o proyectos de Intenet of Things. En cualquier caso el proyecto podría reproducirse con una placa de Arduino Leonardo y un módulo Wifi externo (tipo RN-XV por ejemplo) o incluso modificando el código supongo que podría hacerse compatible con un Arduino Yun.
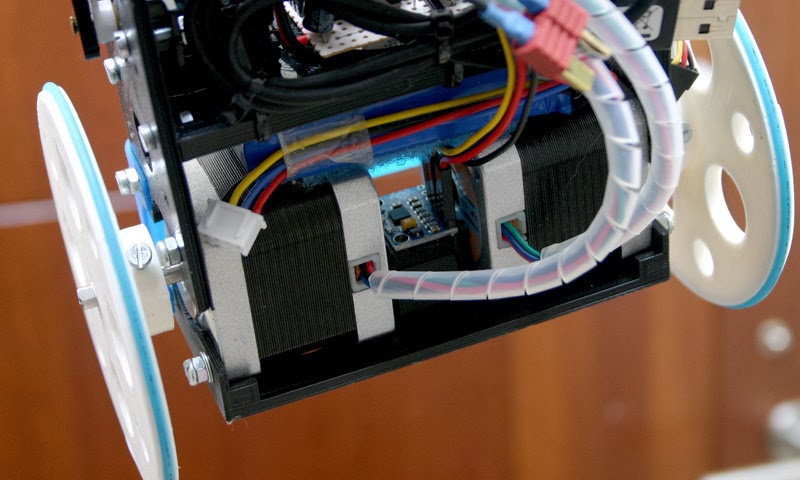
La IMU utilizada es un sensor MPU6050 con 3 acelerómetros y 3 giróscopos y usamos además el procesamiento interno DMP para conseguir una solución de actitud (ángulos del robot) a 200Hz.
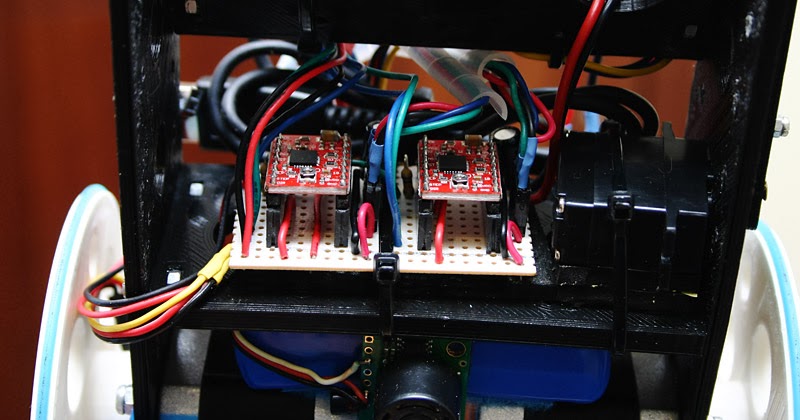
Los motores empleados son Steppers de tipo NEMA17 (de los cortos) con drivers A4988 y Mircrosteping a 1/8. He montado los 2 drivers necesarios en una pequeña placa aparte añadiendo los condensadores y resistencias necesarios (ver datasheet del driver).
Las librerías de Steppers para Arduino que he podido ver permiten controlar la posición de los steppers pero no su velocidad y la mayoría de ellas son MUY ineficientes! así que me he tenido que hacer un pequeño driver en Arduino usando interrupciones para realizar un control preciso de velocidad (funciona a 25Khz).
La interfaz con los smarphone esta basada en el interfaz abierta OSC (mensajes tipo UDP). La aplicación que suelo usar (tanto para Iphone como Android) se llama TouchOSC.
Para el brazo que permite levantar al robot del suelo uso un servo tamaño mini (20gramos)
Por último el sonar empleado es un LV-MaxSonar-EZ3 que tenía libre de otros proyectos...
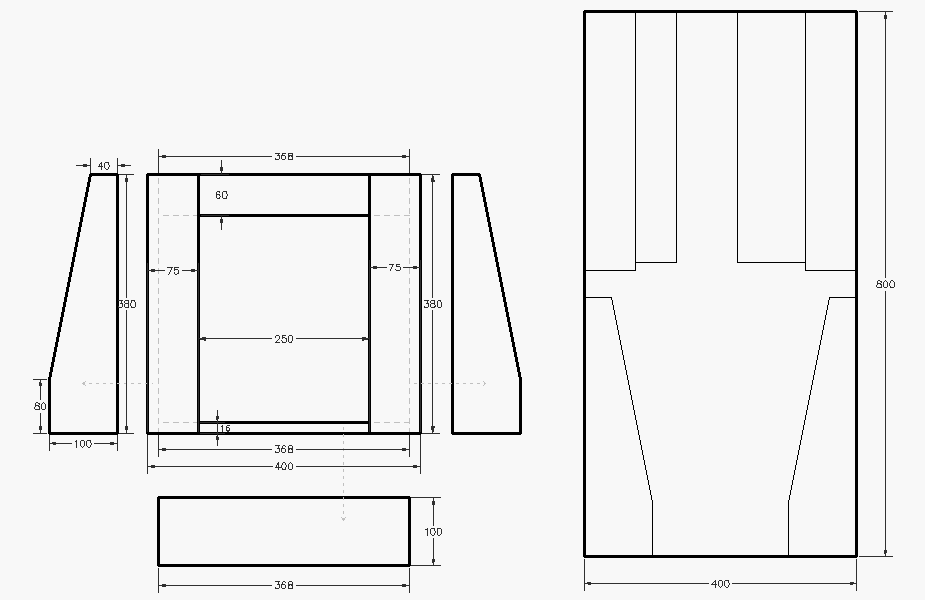
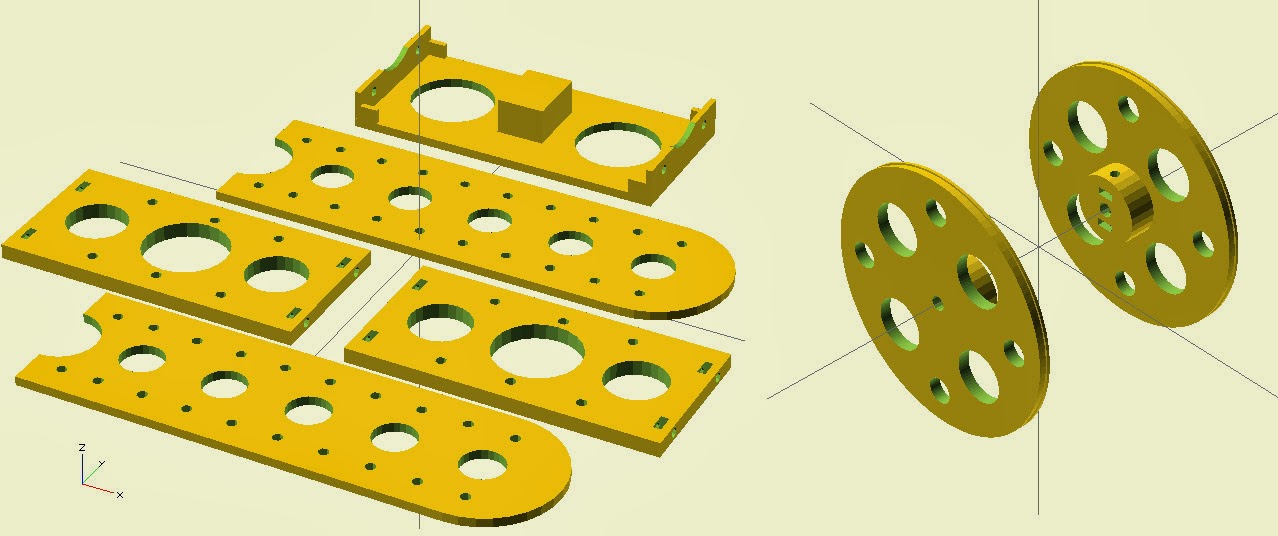
Todos los diseños 3D de las piezas han sido realizados en OpenSCAD.
Todo el proyecto: códigos (Open Source), librerías y diseños 3D están públicos y compartidos en un repositorio de GitHub: https://github.com/jjulio/b-robot
Llevo bastantes años dedicado a la robótica y es la primera vez que puedo partir de un lienzo totalmente en blanco y con toda la libertad para hacer lo que quiera. Lo normal (y muchos me comprenderán...) era hacer una visita a Leroy Merlin (o equivalente) ver lo que hay, planchas, varillas, etc... y diseñar condicionado por eso... Ahora cambia el paradigma, abres un OpenSCAD y ha pensar... un paso más adelante en el mundo DIY, me gusta!
Gracias a Ramon por ayudarme como el video como siempre... ;-)
Jose.