
Heated Build Platform Documentation

170mm Diameter Build Surface
3 Mounting points 100mm Radius, 120deg.
Pre-Assembled and Ready to Use

Heater Resistance: 1.4Ohms
Draws ~114W @ 12V with Cold Start
(3x) On-board Buttons for Height Feedback for Calibrating Endstop Height/Auto-leveling
3K Genuine Woven Carbon Fiber Surface (No tapes, glues, or sprays required)
Mounting
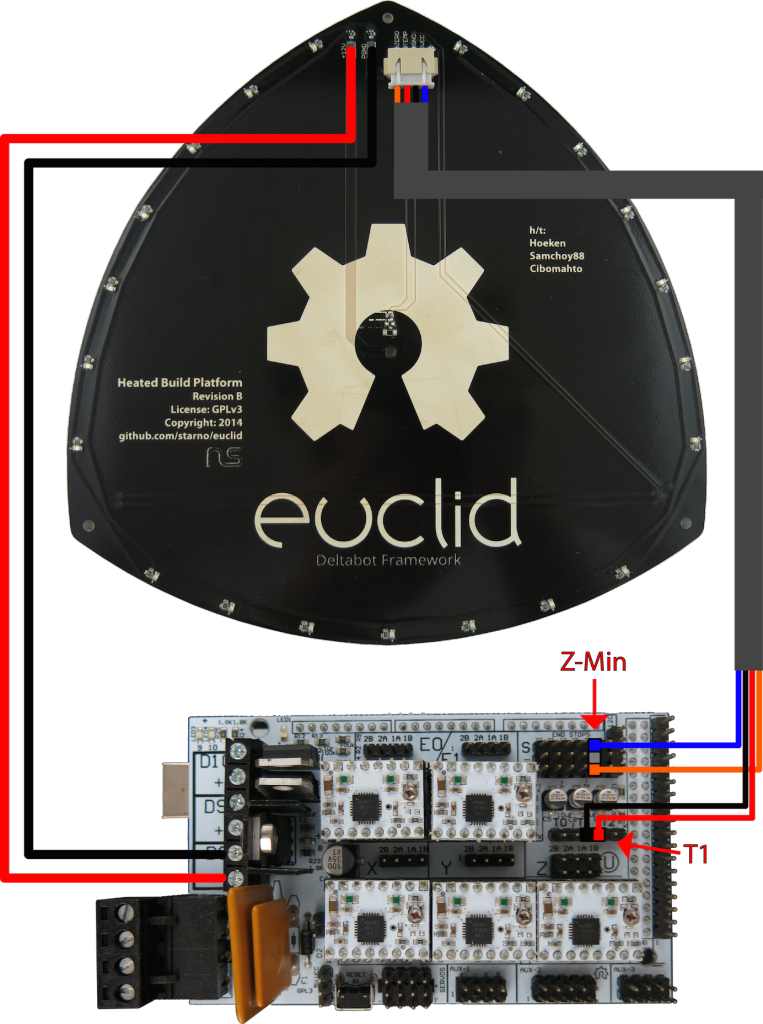
Setting up the euclid HBP is very straight forward. Reference the wire diagram above to ensure everything is plugged into the motherboard correctly. Mount it to your machine using the included springs and M3 bolts, or a custom bracket for spring-less mounting. Be sure your deltabot has already been fully calibrated. Move the machine around using the control panel to get precise coordinates of where each button is located. Edit the button coordinates in the Configurations.h file of this custom delta Marlin firmware and you are ready to go. (The firmware has not yet been submitted into the master branch of Marlin)
Wiring Diagram
Auto-leveling is the process of poking the three buttons on the platform and adjusting the endstop heights to compensate. It is most reliable to run these routines while both the nozzle and platform are at the intended printing temperatures. Otherwise you run the risk of cold plastic on the nozzle activating the buttons prematurely and negatively affecting the results. In this fork of the Marlin firmware, there are 3 defined M-codes for utilizing the button functionality:

M34 will look for a button at the current (x,y) coordinate, return to that location after poking the button, and report back the height of the button when pressed.

M33 will go through a movement routine based on the button coordinates defined in Configuration.h and report back the heights of each button.
M35 will go through the same routine as M33, and use the feedback to adjust the endstop heights accordingly. Once you home again, the end effector will be adjusted to move parallel with the build surface. (This will reset each time the machine is disconnected or restated)
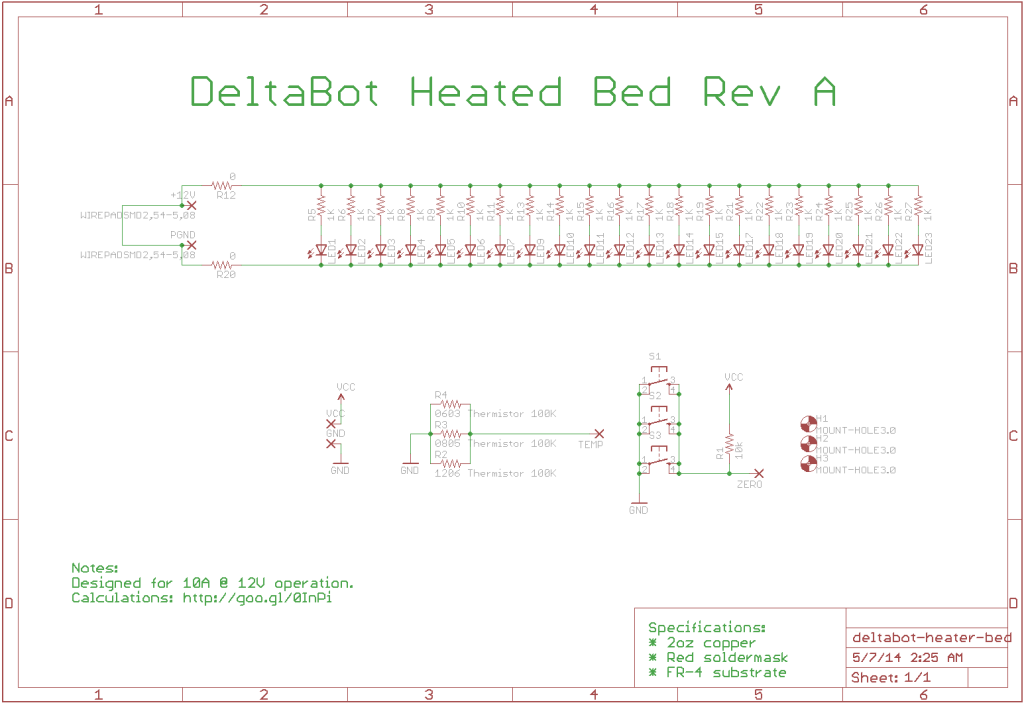 This is a reference only document. The board and schematic source files live on github.
This is a reference only document. The board and schematic source files live on github.
