검색결과 리스트
글
이번에 보여드릴 쿼드콥터 제어기법은 음... 어느날 문득 생각나서 해봤는데 되더군요... 긴가민가하긴 했지만, 뭐 덜컹되니까 살짝 기고만장했더라는...ㅋㅋㅋ
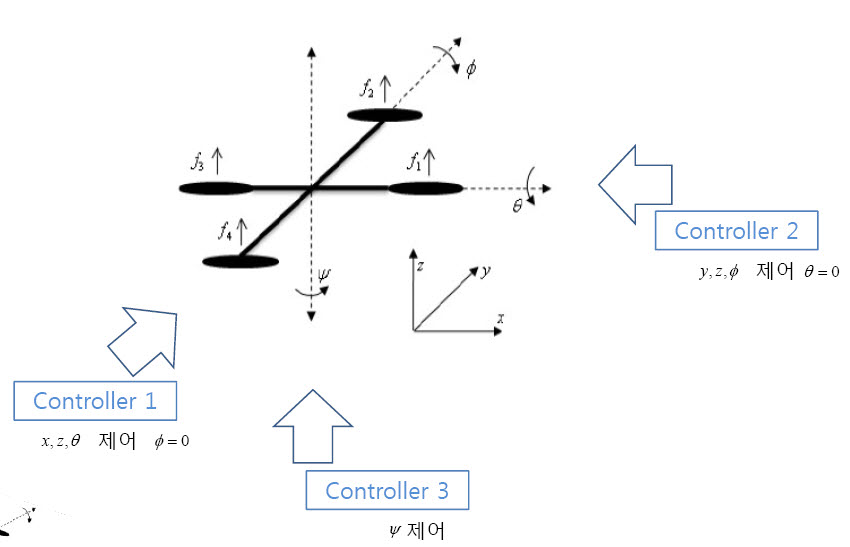
위 그림처럼 쿼드콥터를 세개의 제어기로 제어하겠다는 이야기입니다. 일단 왜 이런 생각을 하게 되었냐면
2009/05/19 - [쿼드콥터/ControlTheory] - 쿼드콥터의 궤환선형화기법을 이용한 제어기 설계
위 글에서 설계했던 제어기는 그 제어입력을 보시면 알겠지만 너~무 제어입력이 복잡하거든요. 그래서 쿼드콥터의 동역학 방정식을 막 째려보던 (실제로는 멍~ 때리는 수준) 중에 phi를 0로 둔것과 theta를 0로 둔 결과식이 투로터와 몹시 닮았다는걸 알게된겁니다...^^

이미
2009/05/19 - [쿼드콥터/ControlTheory] - 쿼드콥터(Quadcopter)의 동역학 방정식
위 글에서 소개한 동역학 방정식입니다만, phi를 0로 두면
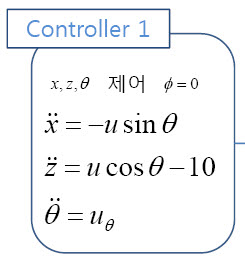
저렇게 되구요... 원 동역학을 다시 theta를 0로 두면
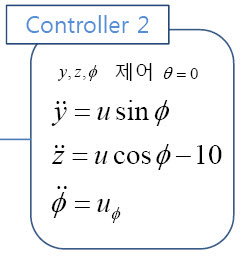
이렇게 되거든요... 부호 딱 한개를 빼면
2009/05/19 - [쿼드콥터/ControlTheory] - Two-Rotor (VTOL) 시스템의 동역학 모델
에서 말한 투로터죠...^^ 그러면 두로터 제어기에서 부호만 살짝 신경쓰고나면 그냥 두개를 달면 될듯이 보이더라는 거죠... 아... yaw제어를 위해서는 별도의 제어기가 하나더 필요하더군요...ㅜ.ㅜ
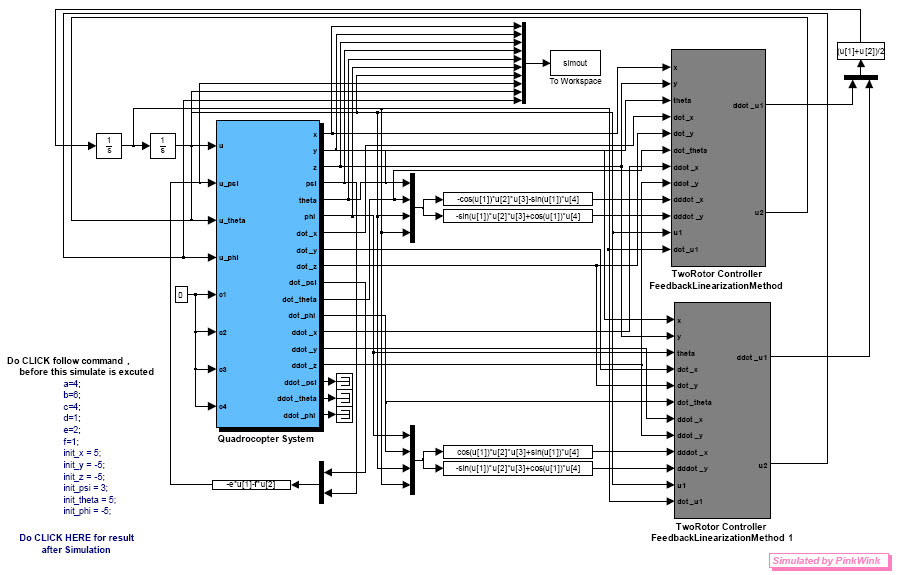
하여간 그렇게해서 위와같이 기존에 투로터에서 쓰던 제어블럭을 가져와서 살살 연결해보았습니다. 그랬더니

괜찮네요...x,y,z 상태는 괜찮아요....^^
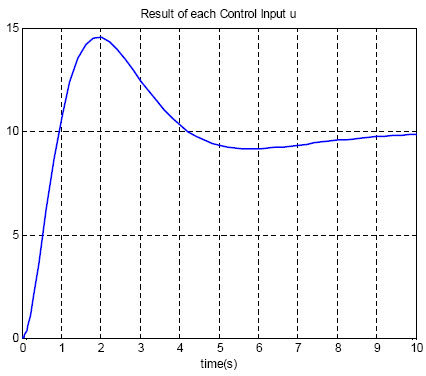
전체 양력을 의미하는 로터4개의 합도 괜찮습니다...
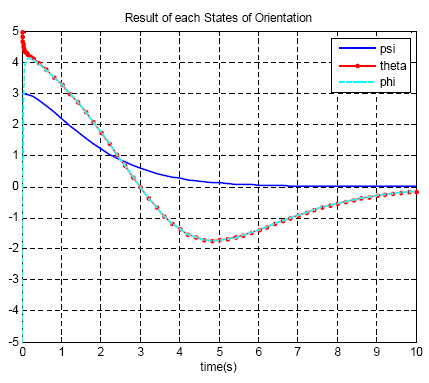
근데 각 기울진 각도를 의미하는 psi,phi,theta의 극 초반 변화가 극심하다는 것이 눈에 거슬리네요... 그런데 그것보다
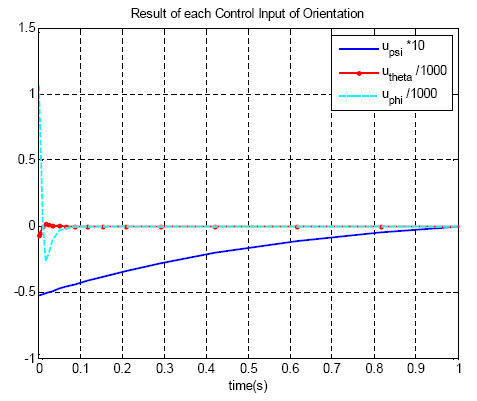
u_theta와 u_phi의 제어입력이 너무 크다는게 좀 더 거슬립니다. 뭐 아직 실테스트는 못해보고 있지만, 그냥 이렇게 제어기를 꾸며서도 되더라...로 만족해야겠네요...ㅜ.ㅜ.



위 그림처럼 쿼드콥터를 세개의 제어기로 제어하겠다는 이야기입니다. 일단 왜 이런 생각을 하게 되었냐면
2009/05/19 - [쿼드콥터/ControlTheory] - 쿼드콥터의 궤환선형화기법을 이용한 제어기 설계
위 글에서 설계했던 제어기는 그 제어입력을 보시면 알겠지만 너~무 제어입력이 복잡하거든요. 그래서 쿼드콥터의 동역학 방정식을 막 째려보던 (실제로는 멍~ 때리는 수준) 중에 phi를 0로 둔것과 theta를 0로 둔 결과식이 투로터와 몹시 닮았다는걸 알게된겁니다...^^
이미
2009/05/19 - [쿼드콥터/ControlTheory] - 쿼드콥터(Quadcopter)의 동역학 방정식
위 글에서 소개한 동역학 방정식입니다만, phi를 0로 두면
저렇게 되구요... 원 동역학을 다시 theta를 0로 두면
이렇게 되거든요... 부호 딱 한개를 빼면
2009/05/19 - [쿼드콥터/ControlTheory] - Two-Rotor (VTOL) 시스템의 동역학 모델
에서 말한 투로터죠...^^ 그러면 두로터 제어기에서 부호만 살짝 신경쓰고나면 그냥 두개를 달면 될듯이 보이더라는 거죠... 아... yaw제어를 위해서는 별도의 제어기가 하나더 필요하더군요...ㅜ.ㅜ
하여간 그렇게해서 위와같이 기존에 투로터에서 쓰던 제어블럭을 가져와서 살살 연결해보았습니다. 그랬더니
괜찮네요...x,y,z 상태는 괜찮아요....^^
전체 양력을 의미하는 로터4개의 합도 괜찮습니다...
근데 각 기울진 각도를 의미하는 psi,phi,theta의 극 초반 변화가 극심하다는 것이 눈에 거슬리네요... 그런데 그것보다
u_theta와 u_phi의 제어입력이 너무 크다는게 좀 더 거슬립니다. 뭐 아직 실테스트는 못해보고 있지만, 그냥 이렇게 제어기를 꾸며서도 되더라...로 만족해야겠네요...ㅜ.ㅜ.
'The Robot > ControlTheory' 카테고리의 다른 글
| T-S 퍼지를 이용한 쿼드콥터 제어 (14) | 2009/07/23 |
|---|---|
| T-S 퍼지 모델을 이용한 Two-Rotor 시스템의 제어기 설계 (0) | 2009/07/20 |
| T-S 퍼지 모델을 이용한 로터리 펜들럼 제어기 설계 (4) | 2009/07/20 |
| 투로터제어기를 이용한 쿼드콥터 제어기 설계 (10) | 2009/05/31 |
| 쿼드콥터의 궤환선형화기법을 이용한 제어기 설계 (2) | 2009/05/19 |
| 쿼드콥터(Quadcopter)의 동역학 방정식 (16) | 2009/05/19 |
| 궤환선형화 기법을 사용한 Two-Rotor 안정화 제어기 설계 (6) | 2009/05/19 |
| Two-Rotor (VTOL) 시스템의 동역학 모델 (6) | 2009/05/19 |
설정
트랙백
http://pinkwink.kr/trackback/68


저에겐 너무나도 어려운 말들;;
사실 저한테도 아주 어렵습니다...
그럼에도 불구하고
적어도 공대에서는 10대학생때 가졌던 의문
-도대체 왜 수학을 하는 거야...-는 이해하게 되었습니다...
그러나.... 어려운건 사실입니다..ㅜ.ㅜ
오~~제가 모르는세계를 알고계시군요~~활기찬 6월되세요~~
이 세계... 저도 아직은 잘~~~~^^
헉~ 아침부터 어질어질.
이건 뭔가요? ^^?
pinkwink님은 공대생인가요?
네...공돌이지요...냠냠냠...^^
안녕하세요 다름이아니라 쿼드콥터 자작까페에서 핑크윙크님이 양력 및 회전력 테스트를하셨더라고요..그,,그런데 예전 Tistory? 란데 서버가 깨져서 그림이 안나오네요 ㅜ 혹시 예전 실험했던 자료가 남아있으시면 올려주실수있으신가요? 부탁드립니다
당시 실험했던 자료는 2년?? 정도 된것같은데..
그때는 제가 티스토리가 아니라 별도로 홈페이지를 운영할때였습니다. 그때당시 티스토리로 이주하면서 당시 자료를 모두 백업하진 못했습니다.
그리고.. 그때 실험을 올바로 수행한게 아니었다는것을 알게 되어서 다시실험하지는 않았습니다.
찾으시던 자료를 찾지못해 어쩌나요....ㅠㅠ
아니예요 ㅎ 그래도 항상 pinkwink 님덕분에 새로운걸 많이보고 배워간답니다 ^^
네... 좋은 결과가 함께하길 바랍니다.^^